
では、今回はやっと「STEVAL-DRONE01」の組み立てに入りたいと思います。
楽しみ〜!!
今回も「Interface」3月号を参考にさせていただきます。
あと、STマイクロエレクトロニクス社のWebページにユーザーマニュアルがあるので、こちも参考にして組み立てます。

まず本体ですね。
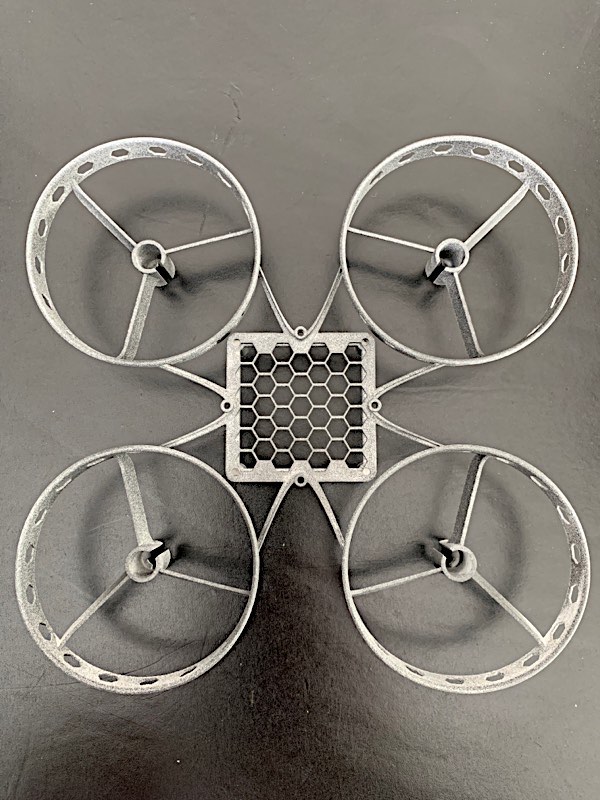
こいつにモーターやFCU基板を取り付けて行きましょう!!
ですが・・・焦る気持ちも抑えつつ慎重にいきましょう。
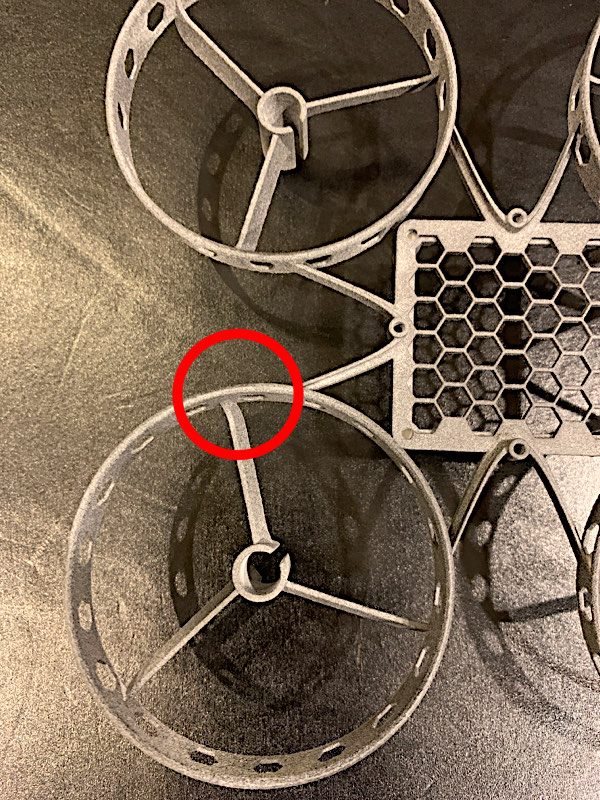
ここで、フレーム自体の前後ってあるのか?ということですが・・・
あったんですね〜。。
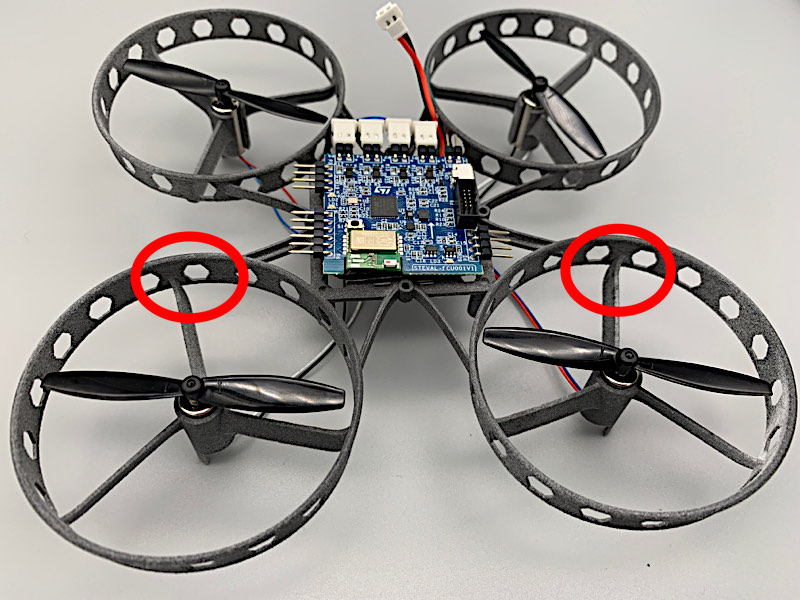
赤枠内の箇所にご注目!!
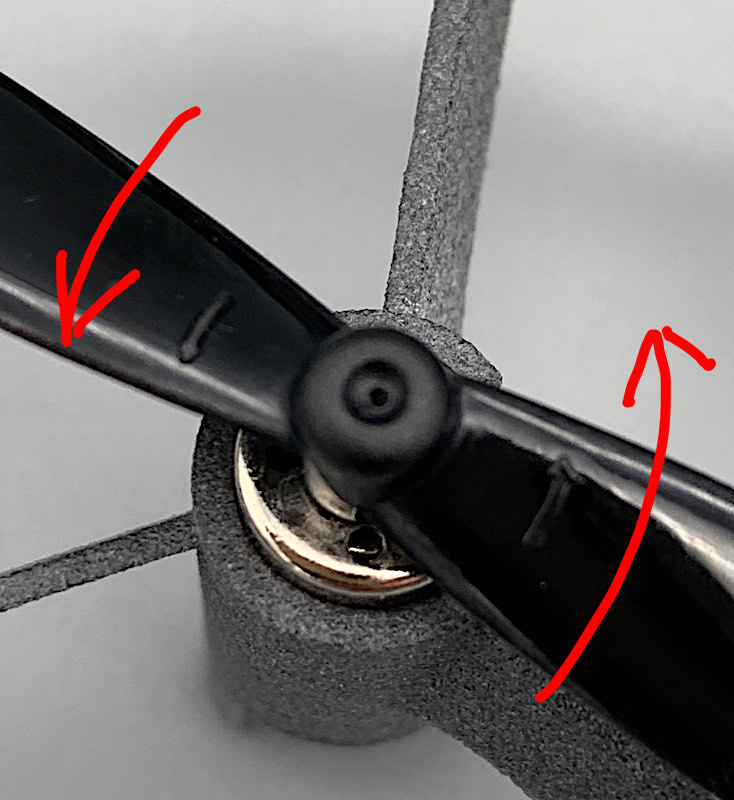
フレームには角度が付いています。
この角度はプロペラの角度とフレームの角度を合わせる必要があります。
最初見た感じ、フレームに前後なんてないだろっと思って「Interface」の記事も読み過ごしていました。
ST社のマニュアルを眺めていて初めてフレームの形がそれぞれ異なることを発見し、びっくりしました。
子供の頃から説明書を見ずにプラモデルを組み立てるタイプだったんで失敗が多いですが、さすがに慎重になりました。
大人になりましたね〜わたし。注意力が足りないだけかもしれませんが・・・
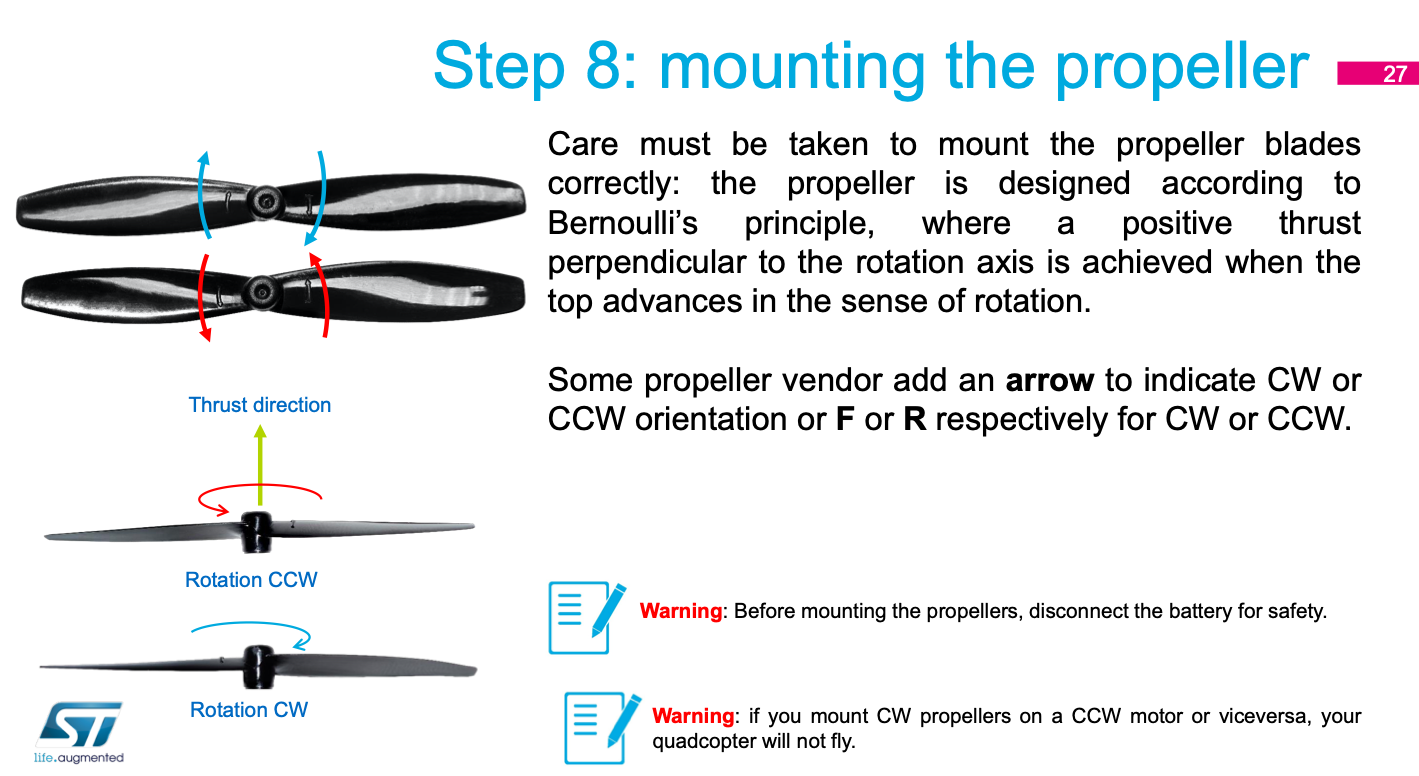
脱線しましたが、STマイクロエレクトロニクス社のWebページの「STEVAL-DRONE01 GETTING STARTED GUIDE」をみてみると・・・
フレームの向きとプロペラの向きの注意があります。
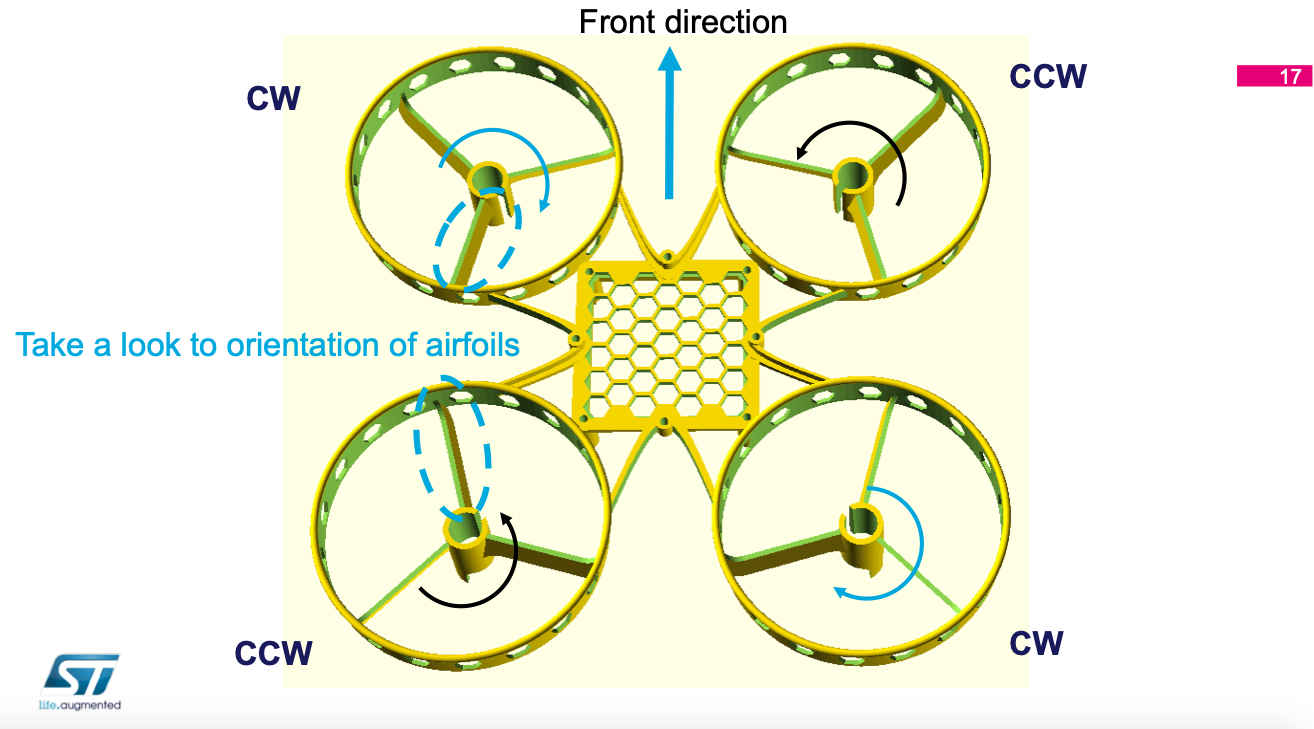
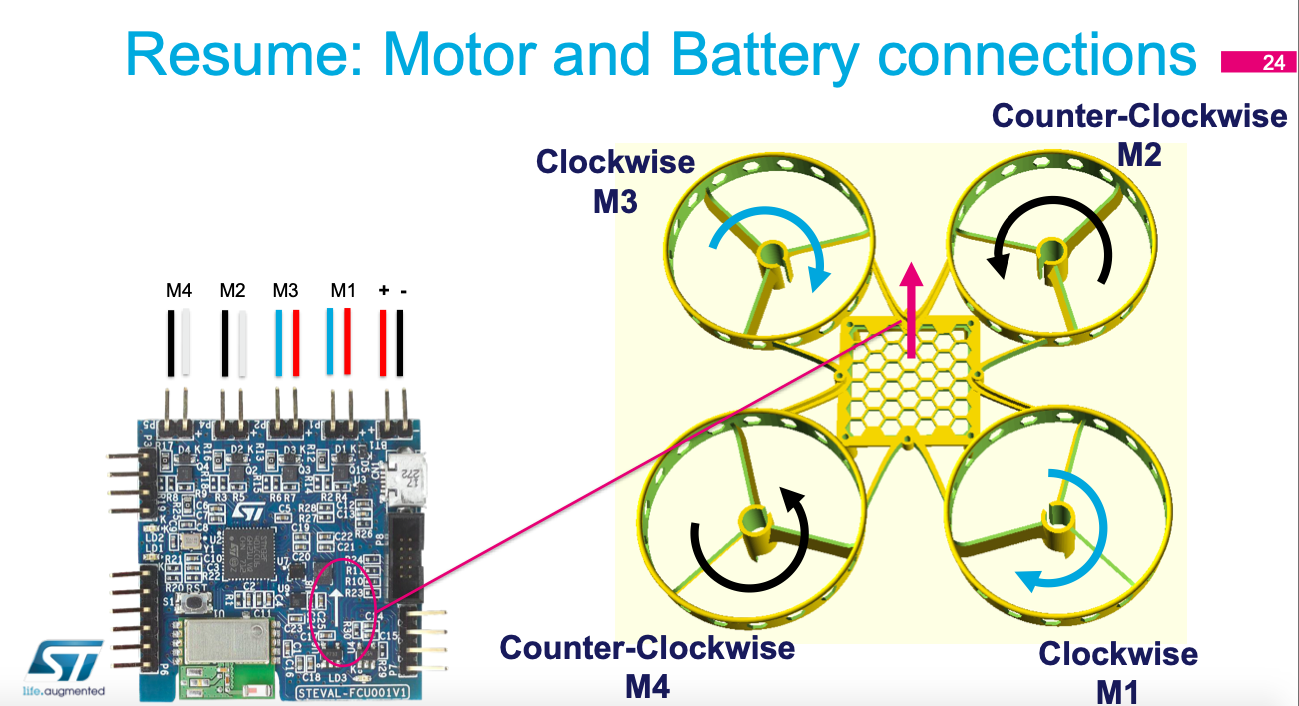
ちなみにモーターは2種類あってCWとCCWで、それぞれ見分け方はモーターから出ているコードの色でわかります。
- CW (clockwise motors) : 時計回り →赤と青のコード
- CCW(counterclockwise ) : 反時計回り →白と黒のコード

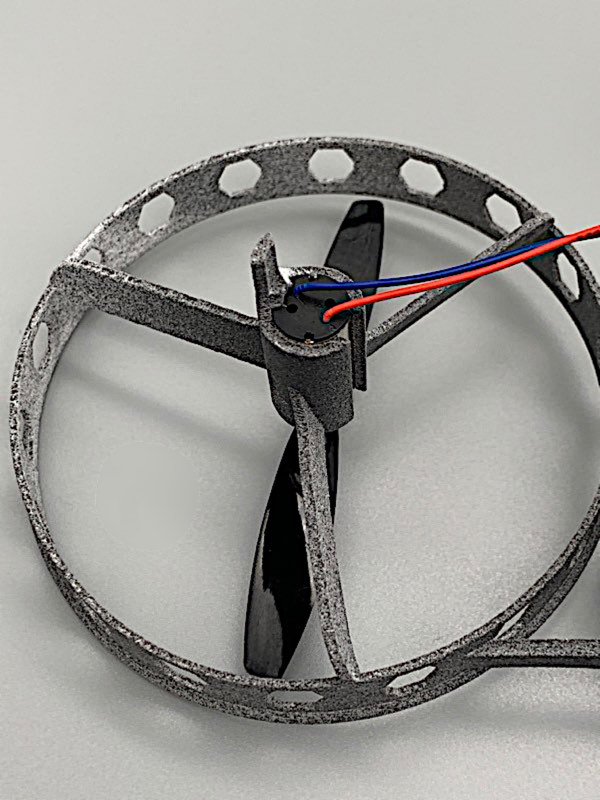
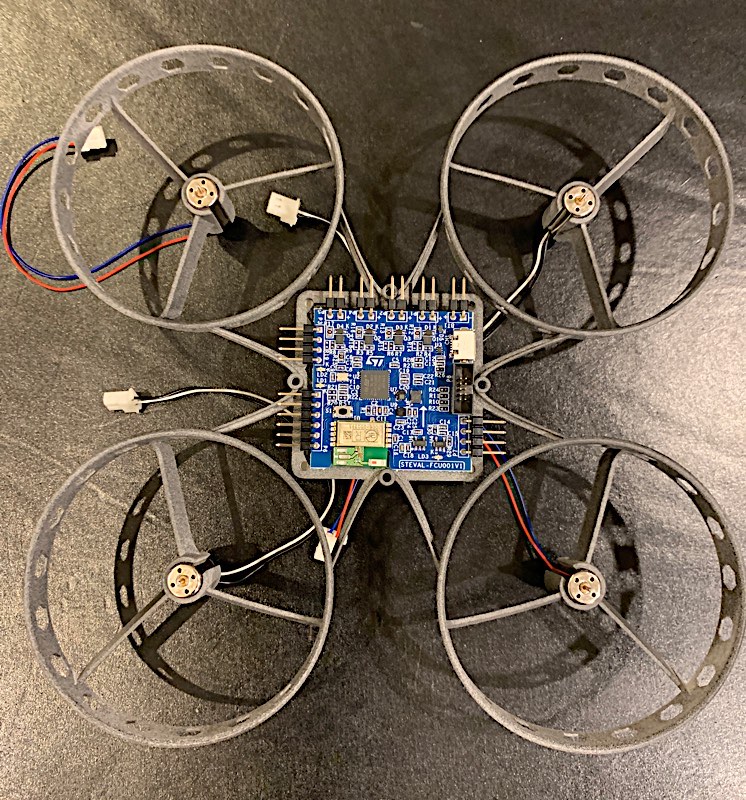
ということで、こちらがモーター取り付け後のフレームです。
写真上がドローンの前です。

モーターを差し込むとフレームの裏に1つツメがあって、そこでモーターは止まります。
取り付けるモーターの種類(CW&CCW)に合わせてプロペラも2種類あります。
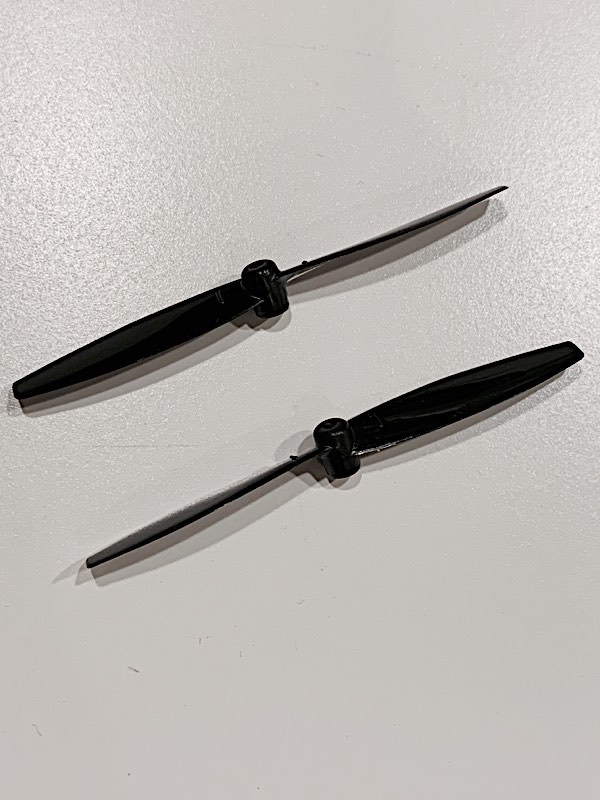
親切なことにプロペラに矢印で向きが記されています。わかりやすいですね。
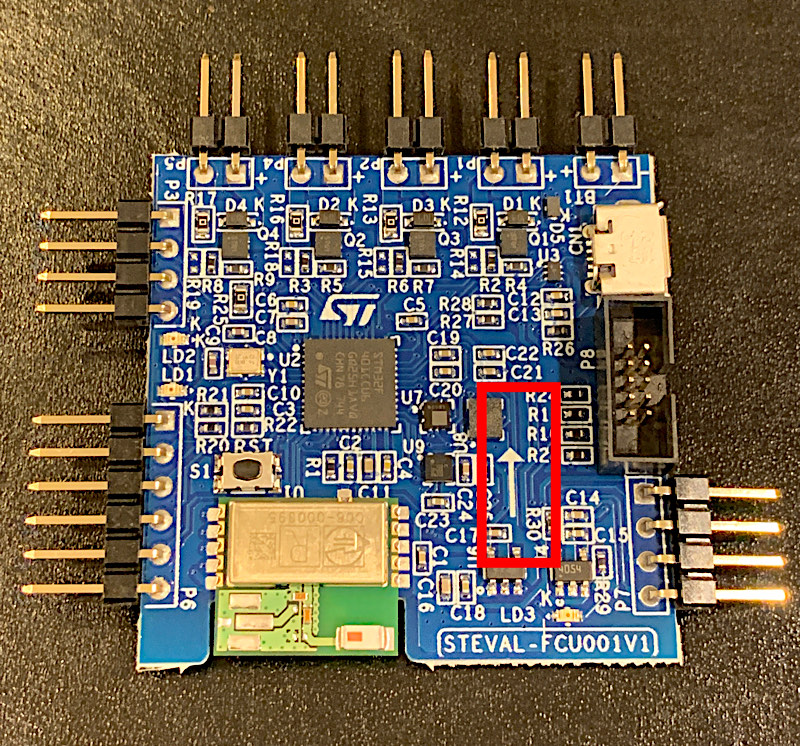
そしてFCUですが、こちらも向きがあります。
ただし、基板に矢印が記してありますので間違えないですね。赤枠内に矢印があります。
FCU基板を載せました。
じゃああとはプロペラと配線です。
じゃあ配線。
モーターのCW&CCWを意識してマニュアルのとおり配置。
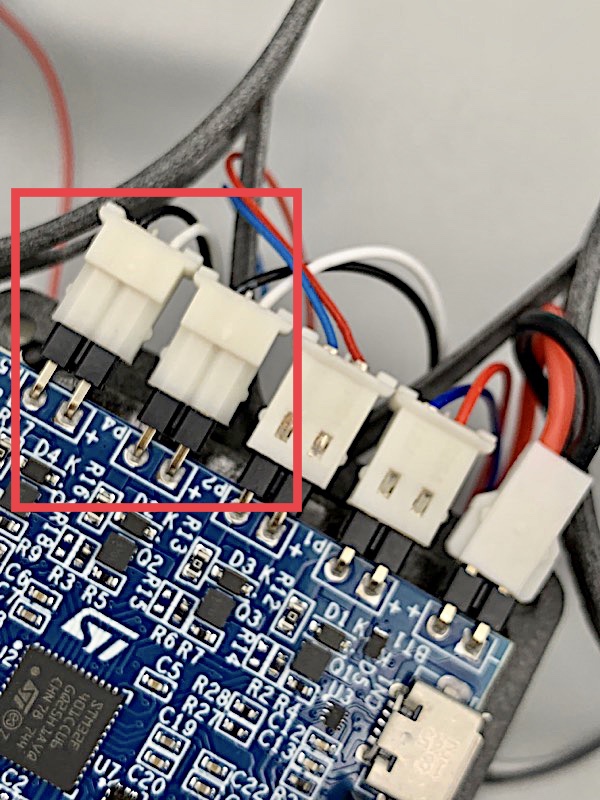
それぞれのモーターとFCU基板との接続位置とプラスマイナスを確認したので、モーターコネクタを接続!!
こうかな。
あれ?CCWのコネクタを取り付ける際はコネクタの向きがCWと表裏逆になるのね。
なんか「Interface」の記事の写真と違う・・・
でも+ーはあっているんですよね・・・
マニュアルどおり接続するとCCWが時計回りになる!!逆!!
う〜ん。コネクタ反対にするか。
黒を+、白をーにすると、ちゃんと反時計回りになった。
CCW用のモーターに+ー逆に通電させると寿命が縮まるんで心配・・・
モーターの仕様が異なる??・・・まずはこのまま進もう。
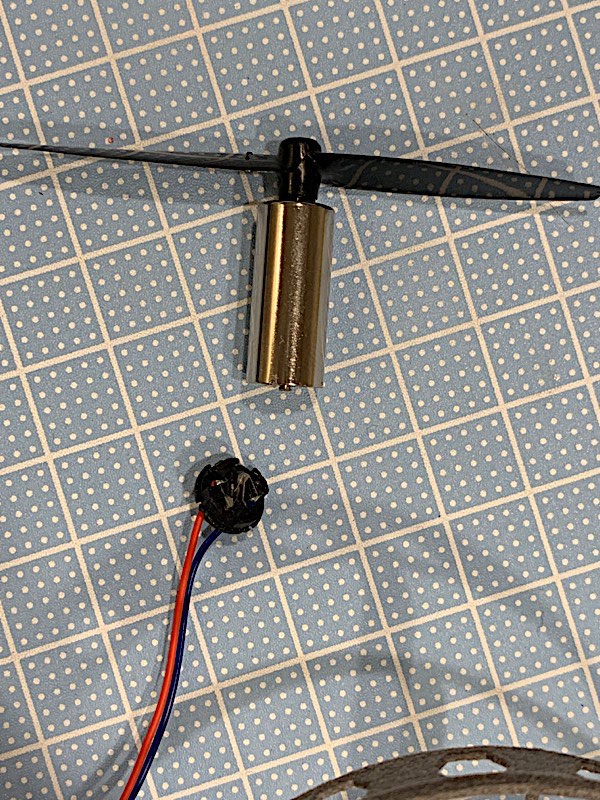
そしてモーターにプロペラをつけました。
プロペラがなかなかモーターの軸に入らない・・・エイやっ!!
お〜〜〜〜〜〜!!抜けたあ〜〜〜〜〜〜!!!
マジかっ!!
え〜!!
まず、もとの位置の戻してモーターを何事もなかったようにする。
通電・・・動かない!!
「なんて日だっ!!」
だめだ、何をやっても動かない・・とりあえず分解・・・
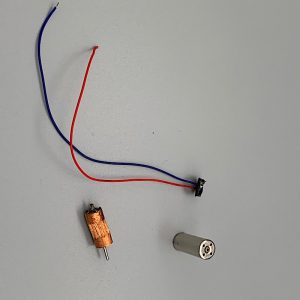
くそ〜死んだ・・・(涙)
家にあるモーター使ってみるか!?
そもそもモーターのスペックは?
3.7 V, 85x20 mm coreless DC motors
同じモーター欲しいな〜。
家にあった85x20のモーター利用。
死んだモーターのコネクタとプロペラをはがして、新しいモーターにコネクタをなんとかつけた。
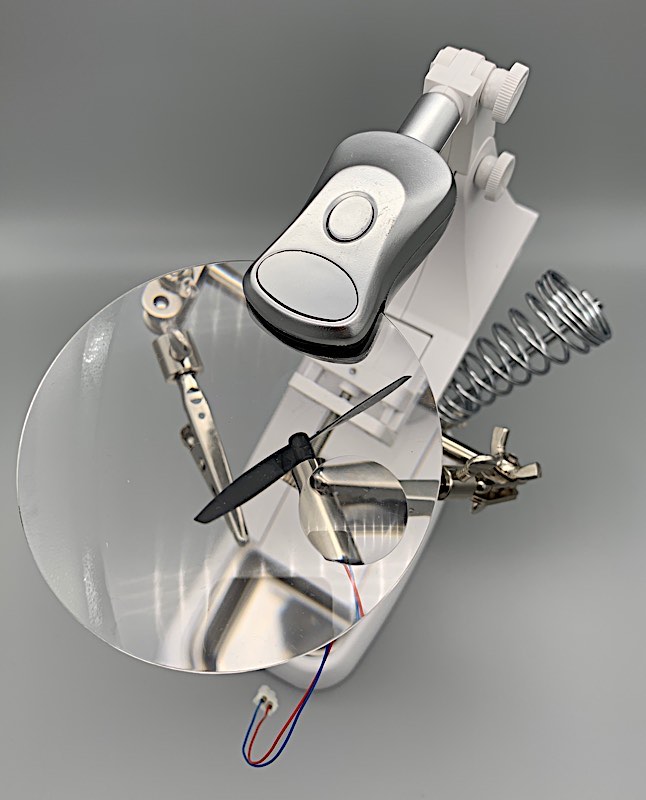
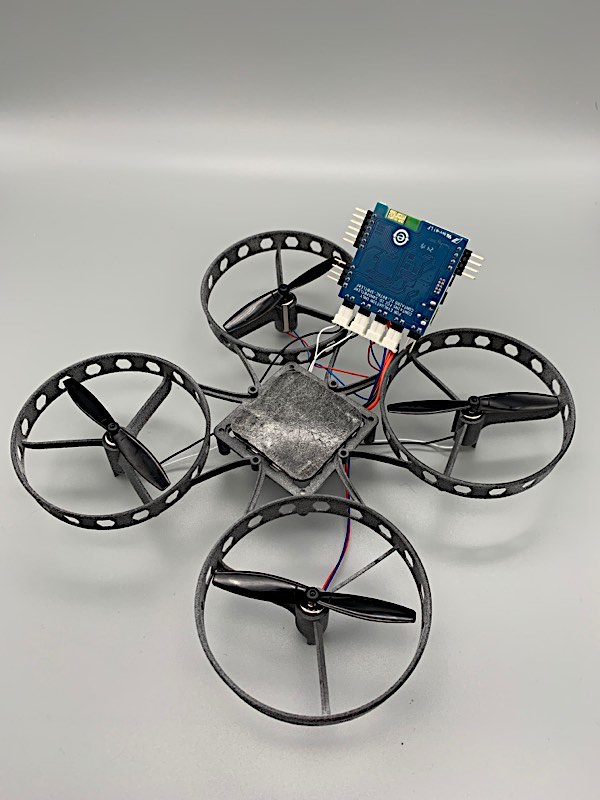
よしなんとか完成。
あとは裏返してLi-Poバッテリーを簡易的につなげて完了。

下から見るとLi-Poバッテリーはこんな感じ。
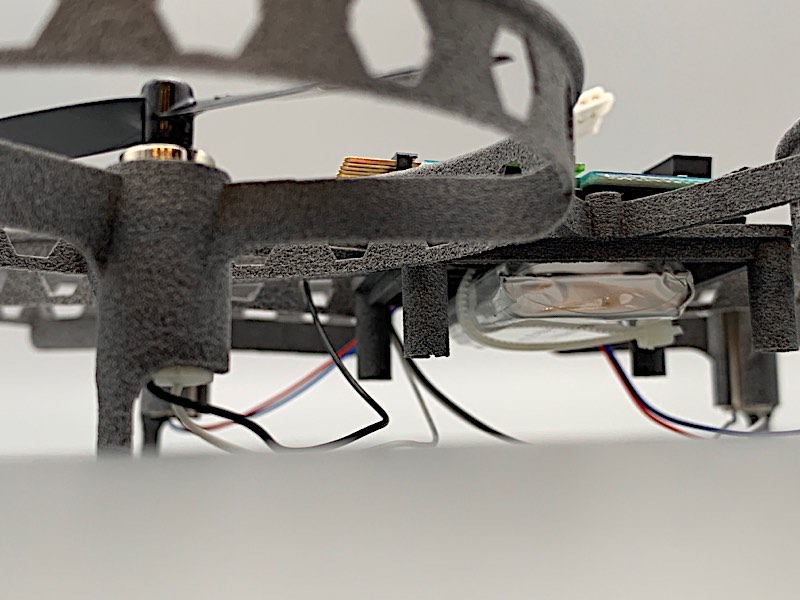
表面に3Mのクッション付きの両面テープの上にFCUを載せて完了。
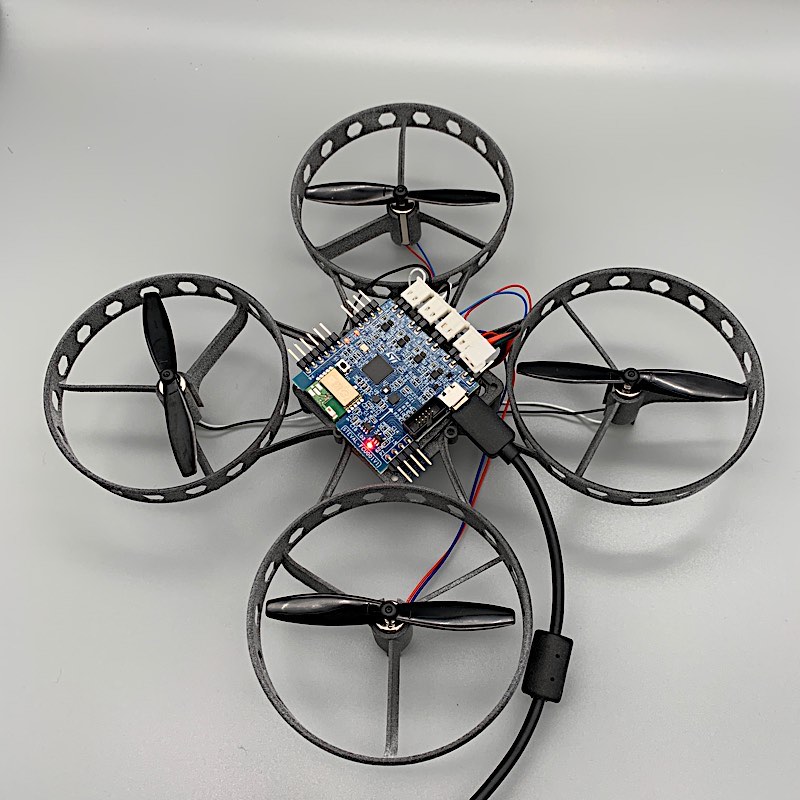
よし、フレームの向きもOK!!
あとは充電をしておきましょう。
このFCU基板はUSB経由で充電出来ます。
ではハードが出来たところで、といつつモーターを壊すハプニングがありましたが、次回はソフトウェア編です。
・STEVAL-DRONE01
