
こんにちは!!、hecatonです。
さあ、今回は先日Kibidangoで購入した犬型四足歩行ロボットキットの「Petoi Bittle(ペトイ・ビトル)」の2回目です。

Table of Contents
Petoi Bittle(ペトイ・ビトル)
前回仮組みで終わっていましたが、今回時間が出来たのでArduinoで動作させるためのボート設定とそのボートへの接続、そしてキャリブレーション、完成!!まで出来ました!!
-

-
犬型四足歩行ロボットキット「Petoi Bittle(ペトイ・ビトル)」がやってきた!!
こんにちは!!hecatonです。 今回はクラウドファンディングの「kibidango」で支援した「Petoi Bittle」がやっと納品されたので いや〜約6ヶ月は待ったね。長かったな。やっと届いて ...
続きを見る

電源を入れて動いた瞬間、感動しましたね〜。
ということで、今回はまずボードの設定からいきましょう!!
これは前回の仮組み状態です。
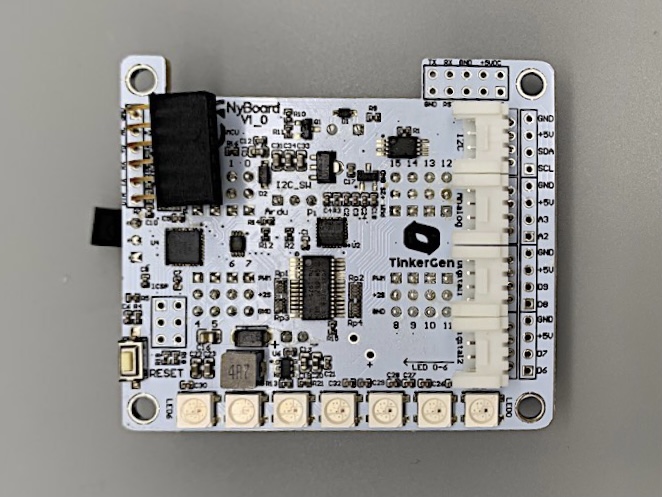
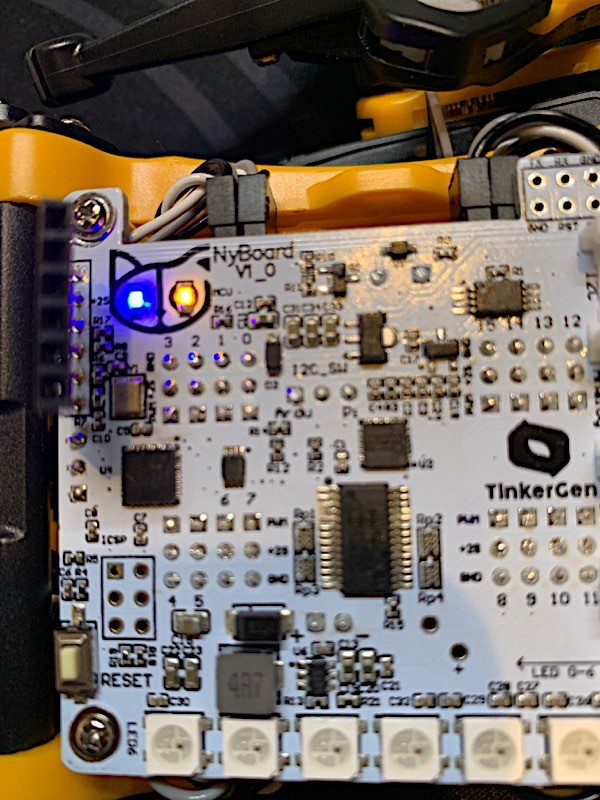
 ボードはこれです。
ボードはこれです。
NyBoard のVerは左上に記載がありますが、V1_0ですね。
これ、あとでボードの設定の際に使います。
1.配線
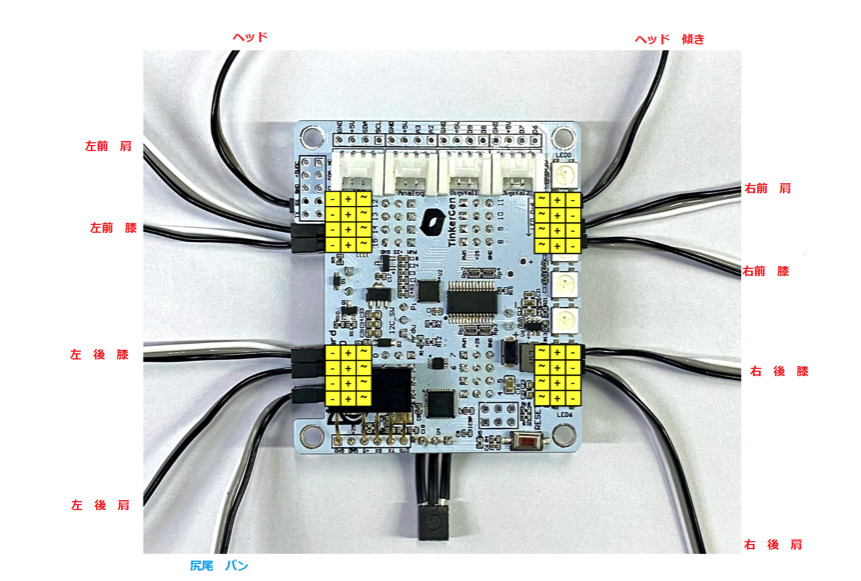
各サーボモーターの配線をします。
頭や足に取り付けたサーボモーターのケーブルを先ほどのボードに取り付けていきます。

ボードの裏に接続先のピンがあります。
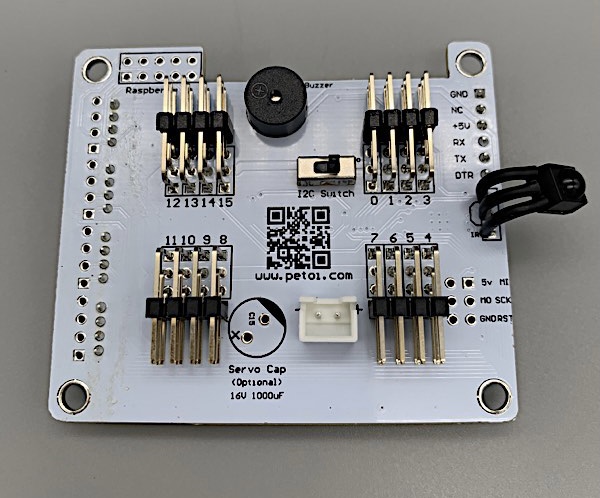
公式マニュアルから抜粋しましたこちらの画像に各接続先が書いてありますので、このとおり接続していけば問題ないです。
だいたい繋がりました。
あとは頭だけ。
あとはボードをネジで止めて完了。
本体を裏返してバッテリーを接続します。

バッテリーは左側がボタンになっていて、ここを3秒以上押すと電源が入ります。

電源が入ると・・・ボード上の猫のイラストの目が光るんですね〜。
遊び心がありますね。
2.Arduino IDEの準備
配線が終了したら、制御ものには必須なサーボモーターの正確な位置決めですね。
まずはPCとの接続のためにボードに同梱されているUSBアダプターを接続しPCと接続します。
下の真ん中のボードですね。
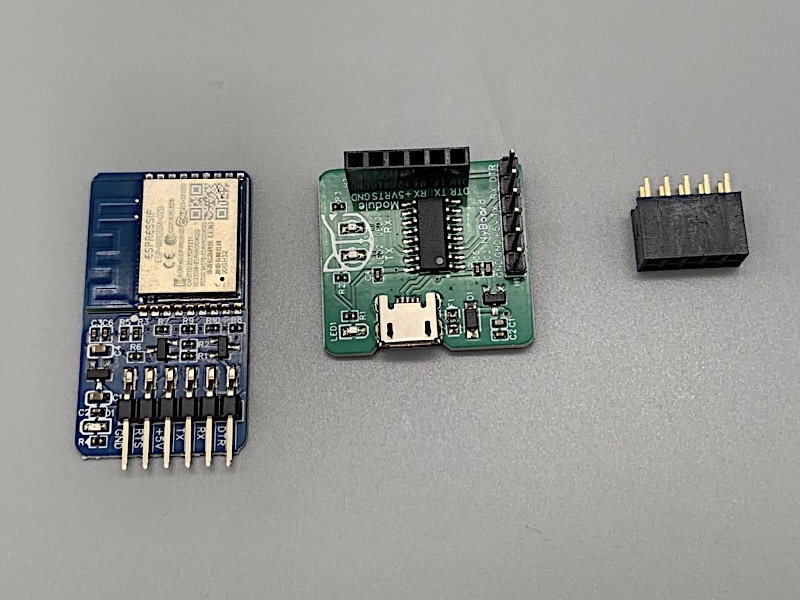
接続できました。
このキャリブレーションにはArduino IDEを利用しますので最新版をDLしましょう。
詳細は公式マニュアルにありますので、そのとおりやればOKですね。
公式マニュアル https://bittle.petoi.com/v/ri-yu/
USBアダプターを接続したらArduino IDEのツール>シリアルポート>/dev/cu.usbserial-xxxx(Macの場合)またはCOM#(Windowsの場合)を選択。
シリアルモニターを開き、ボーレートを設定します。
NyBoard V1_xの場合、ボードはArduino Unoを選択し、ボーレートを115200に設定しますので、私のはV1_0なのでこの設定どおりです。

あとは必要なライブラリ、以下の2つをDLしておきます。
Adafruit PWM Servo Driver (最新バージョン) IRremote (バージョン2.6.1)
「Adafruit PWM Servo Driver」インストール出来ました〜。

IRremote(赤外線通信のライブラリ)はVer2.6.1と指定されているのでこちらを選択。
このVer以外だと同梱されているリモコンで制御が不可になるみたいですね。
その後、IRremote.hをエディタで開いて、"DECODE_NEC"と100行目"DECODE_HASH"のみ1、他の定数は0に設定する。
この設定を省くとメモリが不足するので必ずしないとね。
さらにGitHubから「I2C device library 」のZipファイルをDLします。
Arduino IDEでこれを取り込んでやります。
フォルダ名”Arduino"内の"MPU6050"と12Cdev"のフォルダを追加して完了。
さらにさらに、またGitHubから「OpenCat」をDLします。
展開してファイル名の変更(OpenCat-main からOpenCatに変更)実施して完了。
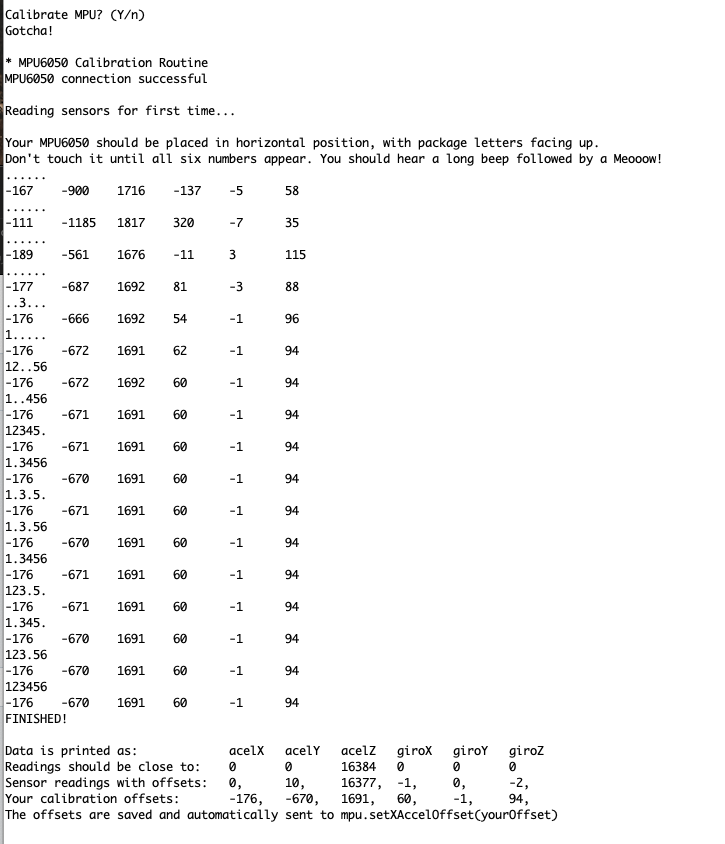
3.キャリブレーション
次はキャリブレーションですね。
(1)NyBoard設定
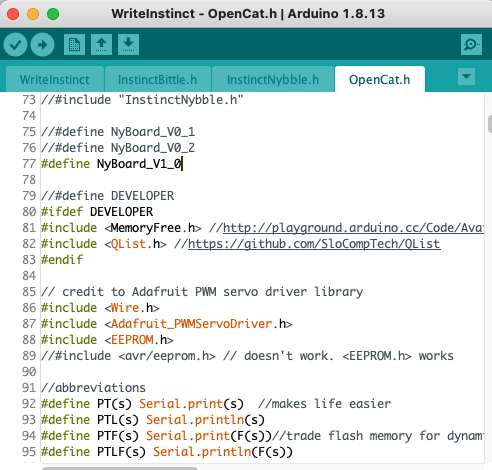
OpenCatフォルダ内にあるOpenCat.inoとWriteInstinctフォルダ内のWriteInstinct.inoを開きます。
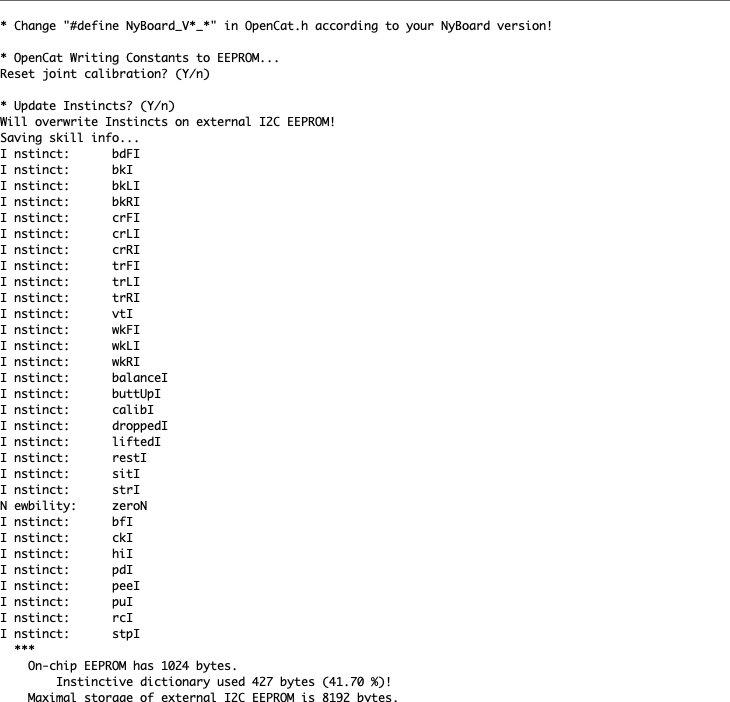
WriteInstinc.inoをAruduino IDE上でマイコンボードに書き込んだ後にシリアルモニタを開くとメッセージが出るので「y」で解答していきます。
途中省きますが、以下のようなメッセージが出てきますので、マニュアルどおり設定していきます。
OpenCat.hの#define NyBoard_V*_*”のVerの確認。
私のはV1_0なので合っていますね。
OpenCat.inoをアップロードして終了。
(2)サーボモーターの調整
これをしっかりやらないと、ちゃんと調整したつもりでも転んだりします。
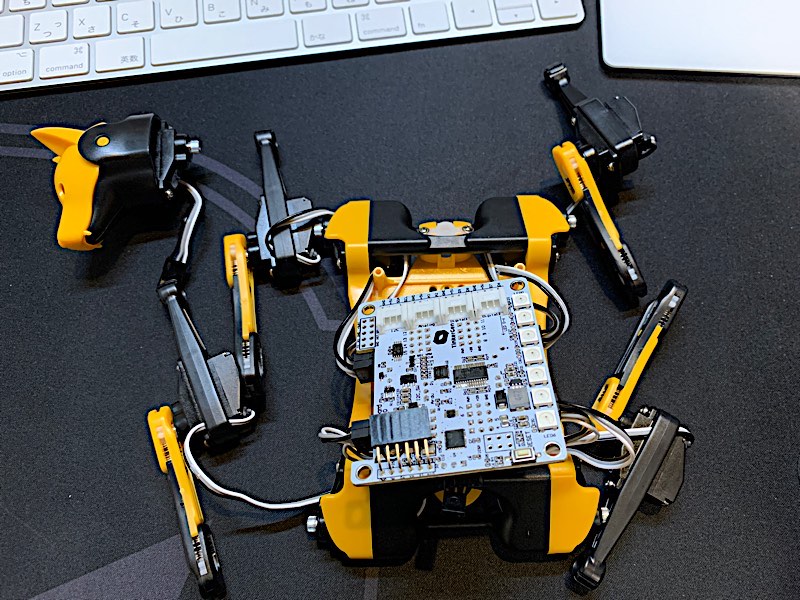
各腕や足等本体に全て接続して下の画像のようなL字に曲げた状態にして調整します。
これが完全な中立状態です。
ここから同梱リコモンを使って動作を確認していきます。

この調整がちゃんと出来たら各腕等のパーツをねじ止めして完了。
ということで出来ました!!

いいですね〜。
一応前回も記載しましたが、私はわざとパーツの色を黒を多めに変えたくて標準のパーツの付け方と別のことをしています。

さあ、これで遊んでみます。
リモコンで基本的な動作だけでなくプログラミングすることで、さらにいろいろ出来るようなので次またゆっくりTryしてみます。

まとめ
少し自動翻訳感のある日本語のマニュアルがあるのでなんとか動く段階までは出来たが、Arduino IDEを初めて利用する方には説明不足な点もありクラファンで購入するような物はなかなか動かすまでハードルが高い。
一応私も完成したとはいえ、キャリブレーションが若干甘いなと感じるところがあるので、また再調整しようと思う。
総合的にハード作成とArduino IDEによる設定を考えるとやはり完成品が私はいいかなと思う。
ということで興味がある方は試してみると良いと思います。
ではまた!!

