
こんにちは!!hecatonです。
今回はクラウドファンディングの「kibidango」で支援した「Petoi Bittle」がやっと納品されたので
いや〜約6ヶ月は待ったね。長かったな。やっと届いてうれしい!!
さて、この「Petoi Bittle」(ペトイ・ビトル)は、いわゆる小型の犬型ロボットで、四足歩行します。
犬型で超有名なのはボストンダイナミクスのロボット「Spot(スポット)」ですが、これのHobby版みたいな感じでしょうか。
これは大きさが手のひらサイズですよ。
ハードは、専用にカスタマイズされたArduinoボードであるNyBoardV1を使います。
自分で組み立てて動作をプログラミングも出来ますよ。

では開封していきましょう!!
じゃん!!
きましたね〜。

Table of Contents
1.パーツ確認
じゃあ開きま〜す。
早速犬の頭がみえますね。そしてサーボモーターね。

サーボモーターをどけて、その下は・・・
足の材料かな?

さらにさらに、ボディーをどけると・・・
なにやらリモコンが1つに基盤ですね。リモコン・・・
これがArduinoボードの「NyBoardV1」かな。

(1)サーボモーター
まずは、サーボモーターの箱とUSBケーブル。
USBケーブルはmicro USBですね。
さ、こちらも中身をみてみましょう!!

中身取り出すとこんなかんじで、サーボモーターが10個、小型の基盤類、ネジと細かいプラスチックパーツ。
そしてドライバーです。
このキットを組み立てるとわかりますが、こんなドライバー使い物になりません。本当におまけです。
で、赤いサークルで囲ってあるのは、サーボモーターがケーブルの長さの違いで2種類あるんですが、長いタイプのものを囲んでます。
ここは、ご丁寧にケーブルが最初から結んであります。
マニュアルが付属されていないので、ここは注意ですね。

これがサーボモーターです。
小型ですね。外側はオイルでベタベタします・・・


(2)ネジ、スプリング、サーボアーム
ネジ、スプリング、そしてサーボアームという白い樹脂のパーツ。
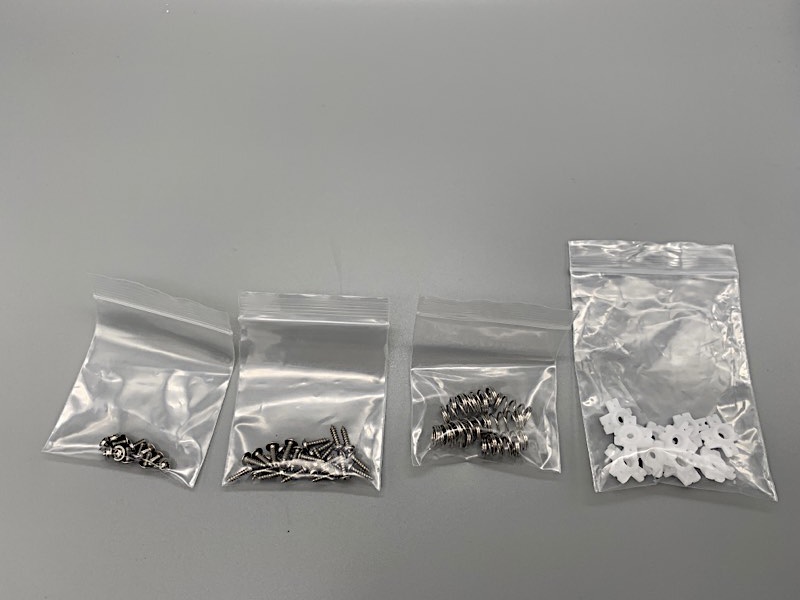
ネジは2種類あります。
左からM2×4とM2×8ネジ。
M2×4は、基盤等の固定用
M2×8は、サーボモーターの取り付け用。

これがサーボアームで、先ほどのモーターとの接続部分になります。
真ん中の円形部分の内側がギザギザしてますね。
ここがモーターの先端とぴったり合います。
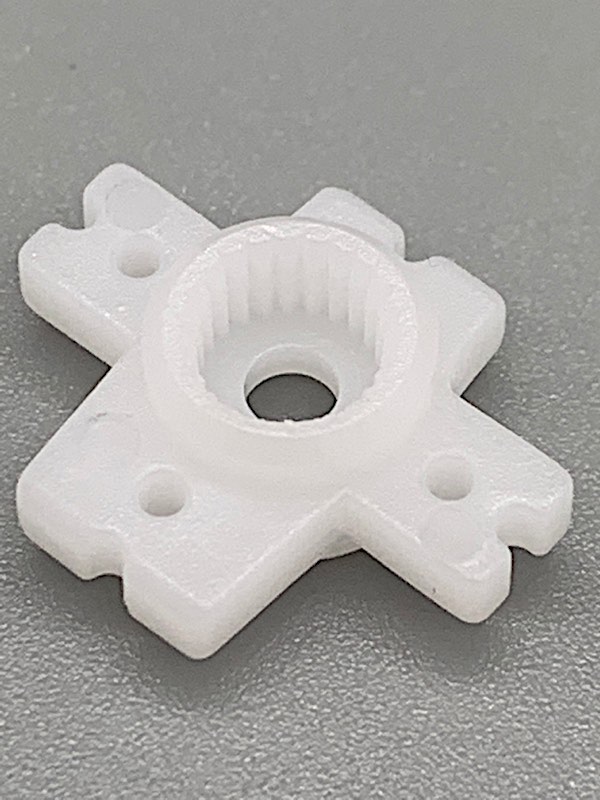
裏はこのギザギザはありません。

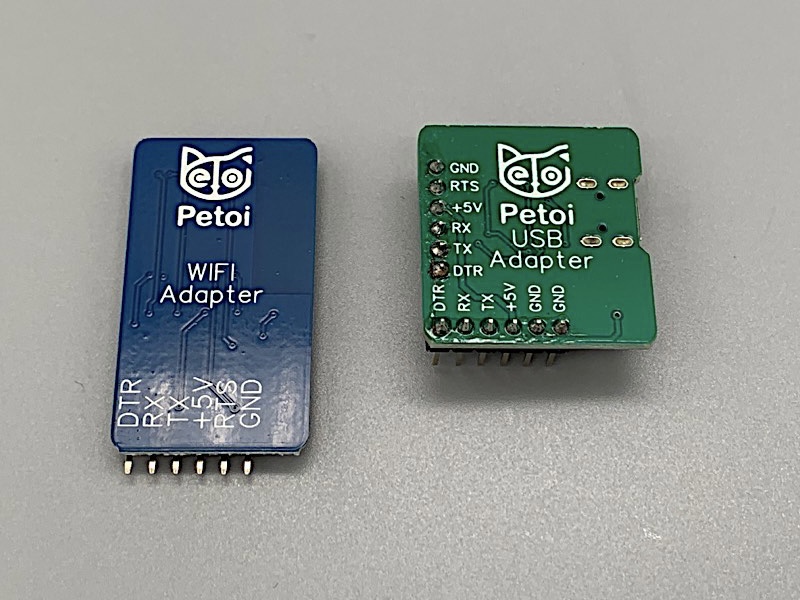
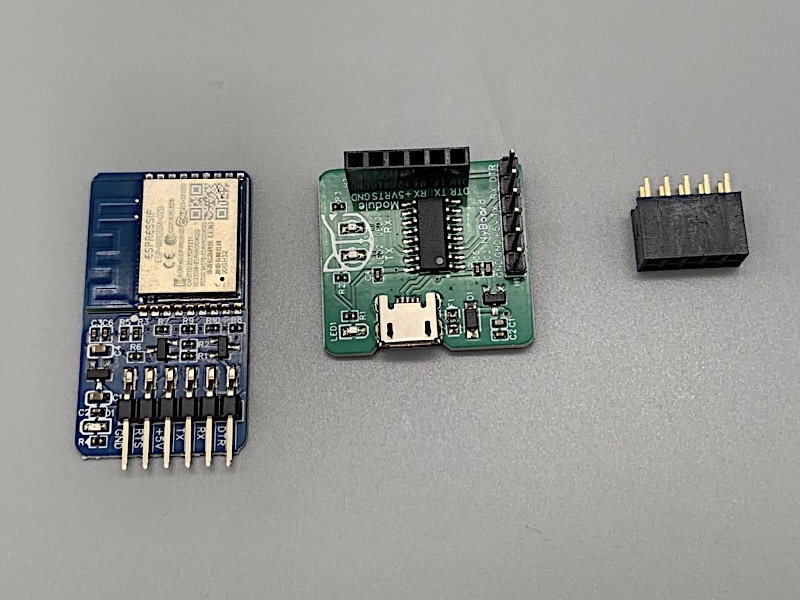
(3)各種Adapter
そしてAdapterです。
既に記載されてますけが、左から「WIFI Adapter」と「USB Adapter」です。
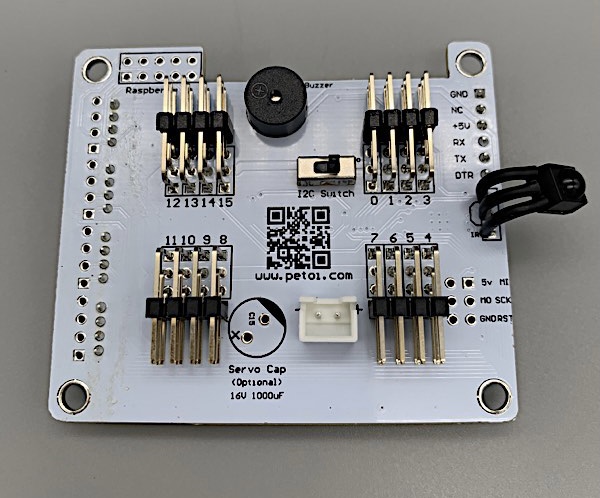
(4)NyBoardV1
そしてメインの基盤。
なんかあまり見たことがない基盤の色・・・
ATmega328P がマスターチップになっています。
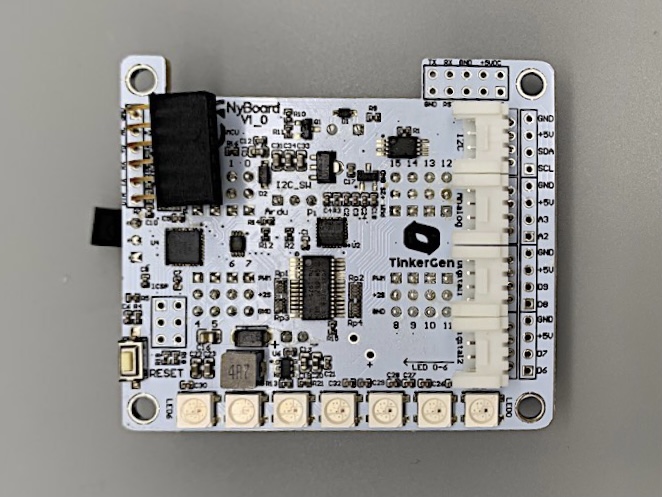
右側の基盤から飛び出た黒い物、これは赤外線センサーです。
真ん中辺にスライドスイッチがありますが、これは外部チップをマスターチップにするかどうか選択出来ます。
なので、外部チップとしてRaspberry piを接続することも出来ます。
推奨はPi3 3A+だそうです。念の為確認してくださいね。

(5)ボディ
ではボディーです。
すでに愛らしい感じが漂ってますね。
早く出してくれ!と言わんばかりの表情・・・表情ないか

取り出すと3つのパーツに大きく分かれます。
左上がボディー、その下がバッテリー、最後に右のが頭ですね。

①頭部パーツ
へっ!!かわいいじゃね〜か。

牙が2本ありますね。

斜め後ろから。
耳がピンっと立てますね。
ちなみに、犬の耳がピンと立つのは、何かに興味があるか注目しているサインと聞きますよね。
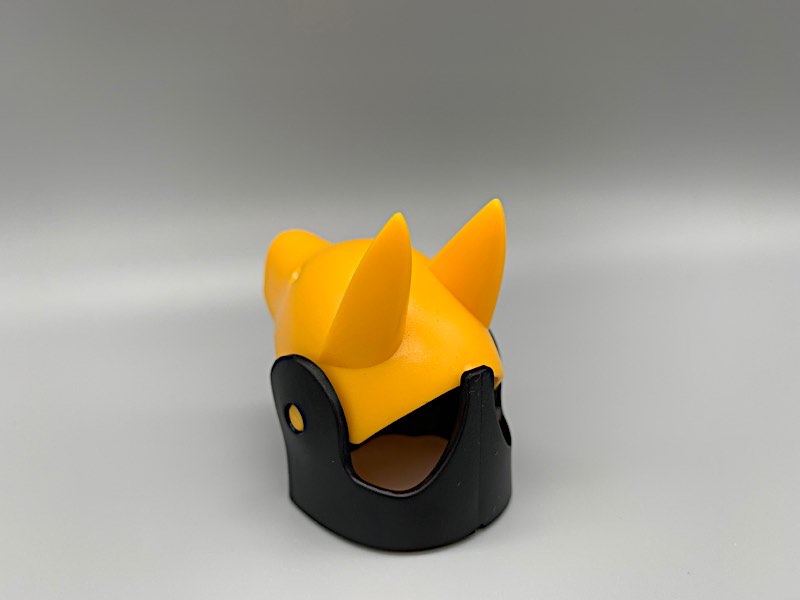
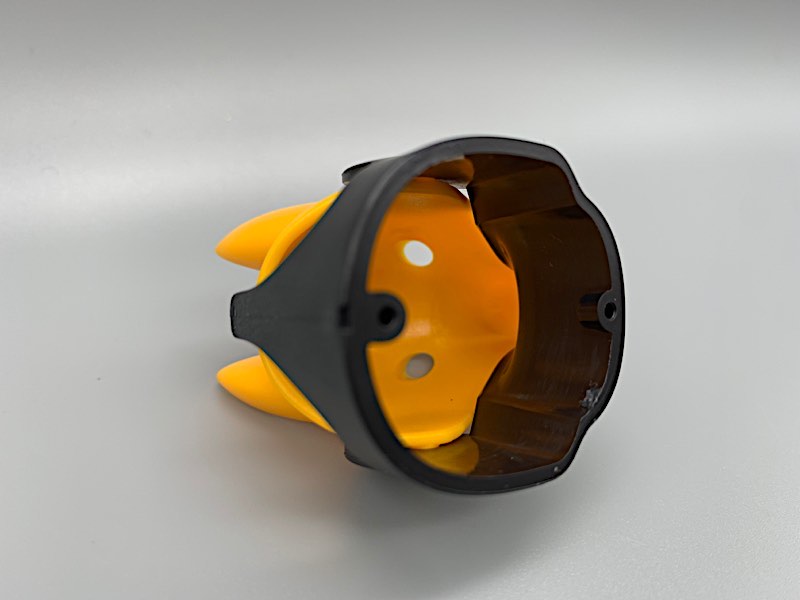
中身は空です。
黒い首の部分に穴が2つありますが、ここにサーボモーターを取り付けます。
これがね〜なかなかネジ入らないんだよね。
電動ドライバーでいっきに絞めたらネジ山いっちゃいました・・・泣
慎重にいかないとね。
だから付属のドライバーなんかで締まるわけないんですよ。

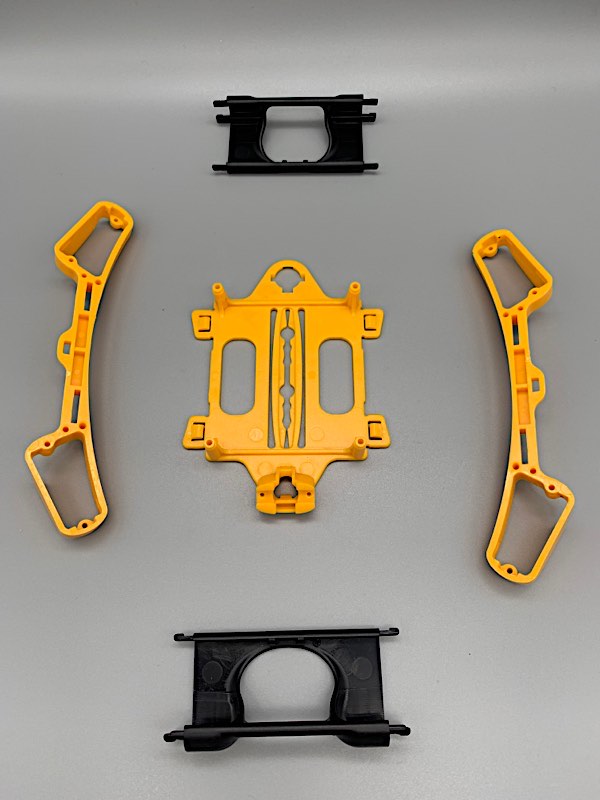
②ボディパーツ(シャーシ等)
そしてこのボディーーーー!!
ぜひジャパネット風にぜひ言ってください。

上のカバーは取り外しできます。
ここにメインの基盤が載るみたいですね。

そしてこの横のボディーーーー!!
ジャパネット風にぜひ言ってください。
ラインが美しいですよね。

そしてこれが裏ね。
ここにバッテリーを装着するんですね。

さらに分解してみました。
分解する時はドキドキしますよね、パーツ同士の接続部分に爪がついているので、外す時に折れないようにしないと。
下の底面と横枠のパーツの接合部分は、しっかりはまっていたので取り外しがこわかったですね。

③バッテリー
そして最後にバッテリーです。
1,000mAhのリチウムイオンバッテリーですね。
右側の丸いところ、上側がLEDで下側が押しボタンになっています。
押しボタンは、押すと電池の状態がわかります。
青から電圧が低下すると赤になります。
2.5秒以上押すと電源on/off出来ます。

このバッテリーの上面の突起でボディーと接続するみたいです。

USBコネクターが付いています。

さ、これで一通り箱の中身は確認出来ました。
じゃあ組み立てしてみようかな。
2.組み立て
(1)頭部パーツ
まずは頭から。
あの白い樹脂パーツを取り付け。
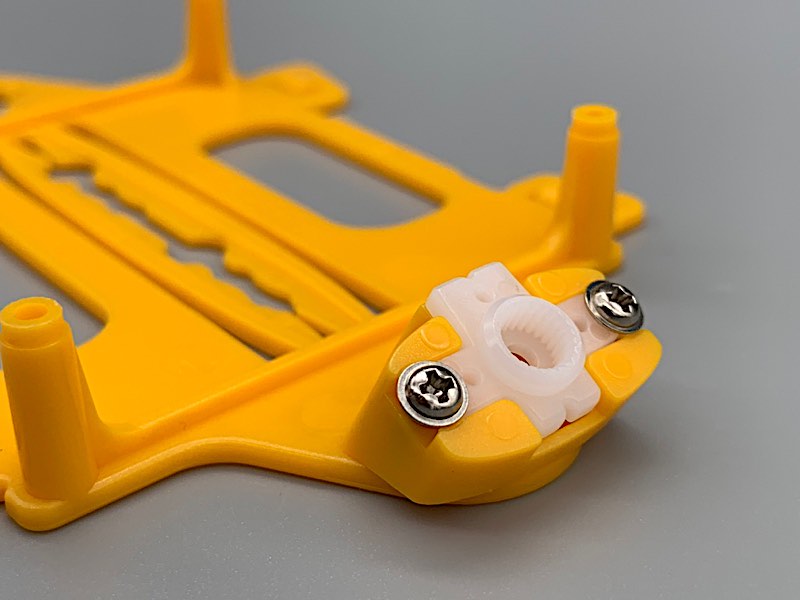
ここにサーボモーターを取り付けてと。
ここに使うモーターは線が短いやつね。

これ手動でねじ止めは厳しいね。キツすぎる。
やっぱ電動ドライバーだな。

(2)脚部パーツ
そして脚のパーツ・・・ここが一番厳しかった。
ここでスプリングを使います。
ま〜強いよこのスプリング。

結構強度のあるプラスチックなのでこんだけ曲げても大丈夫。
これが公式のやり方なんですが、白樹脂パーツの長い方を奥にして差し込みます。
私は足のカラーリングを変えてみたくて樹脂パーツの向きを裏表変更しているので、注意してください。
出来上がりが公式のカラーリングと異なります。

もう一方の同じ型で色違いの黄色のパーツにも同様に樹脂パーツを入れて、重ねます。

出来ました。
もう一度注意点として、白い樹脂パーツの向きを私は逆にしていますので気をつけてください。
本当はギザギザ部分が裏に来ます。このまま組み立てると黒いカラーが多めの出来になります。

そして、ここからが2度とやりたくない作業・・・もう流血しました。
今スプリングが斜めに入っていますが、ここの隙間にこのスプリングを入れます。
マジかっ!!って最初思いました。

この製品は紙媒体でのマニュアルが入っておらずWebマニュアルになっています。
そしてYouTubeを利用した動画マニュアルにもなっていて、このスプリングを入れる作業を見ると、いとも簡単に説明しながらスプリングが「スルッ」て入るんです。

5:37ぐらいからこの取り付けを開始します。
男性で爪も綺麗にしていてね、簡単に入れちゃうわけです。
で、やってみたんですが・・・いやいや、なんども失敗しましたよ。
なかなか入らない。
たまに2回に1回程度私も「スルッ」って入ったんですよ。
ゾーンに入った瞬間でしょうか。
ただ、後半の残り3つぐらいで指が疲れてきたのと親指の先がめちゃくちゃ痛くなります。
そんな状態だと、スプリングが最後には「ばいーーん」ってどこかに飛んでいくし。
ここ悪戦苦闘ポイント。女子は厳しいんじゃないかな。
しかも私なんか、爪の間にバネが入ってはがれたのか、爪の間から流血ですよ。
そこからもうバンドエイドつけてTryするものの、指の酷使・・・途中でやめました。
これ、4本×2箇所で8回もやるんですよ。
よくこんな設計したなと思います。
で、2日目に気持ちを切り替えて朝一番でやったら一発で出来ました。
なんなんでしょうね。指の体力かもしれません。
なんとか泣きながらも出来ました。
これぞ血と涙の結晶です。
スプリングのせいで、爪の先端もぐにゃぐにゃに曲がってました。
動画の説明者はなんであんなに爪綺麗なんだろ・・・
ぜひ焦らず組み立てましょう。
途中で完成品を買った方が良いかもと思ったほどです・・・

(3)サーボーモーター取り付け
さて次は肩?部分にサーボモーターを取り付けていきます。
まずは頭部をつけてみました。
そして肩モーターを取り付けます。
こころなしか喜んでいる感じがしますね。
ここでも短いケーブルのついたモーターを使います。

そして足の先部分のパーツにサーボモーターを取り付けます。
ここで初めて長いケーブルのモーターを使います。

これは左右の足で向きが異なるので気をつけて取り付けます。

さ、これで4本分出来ました。
ロボットも組み立てが終わりに近づいてきたので、さらに喜んでますね。

4.仮組み
ちょっと仮組みしてみますかね。
おお!!いい感じですね!!
公式のカラーリングは異なりますが、ブラックの配色がが多めでかっこいいんじゃないですかね。

イメージ変わりましたね、

後ろはこんな感じ。
尻尾は今回取り付けていません。

という感じで今回は仮組みまでしてみました!!
カラーはもう戻せないです。
また分解してあのスプリングを8回も入れるの嫌ですもん・・・
次回は動かせるかな〜
ではまた!!