
今回もAfrelのホームスクーリング教材を参考に、EV3 Classroomでプログラミングしてみます。
10歳からの「教育版レゴ マインドストーム EV3 for home by アフレル」
![]()
教材はこれですね。
で、前回まではEVベースロボにタッチセンサーのみのロボットでしたが、今回はタッチセンサーを外しGripper(グリッパー )というロボットの手を付けます。これで何か物をつかんだり、はなすことが出来るようになります。
これが「EVベースロボ」でしたね。

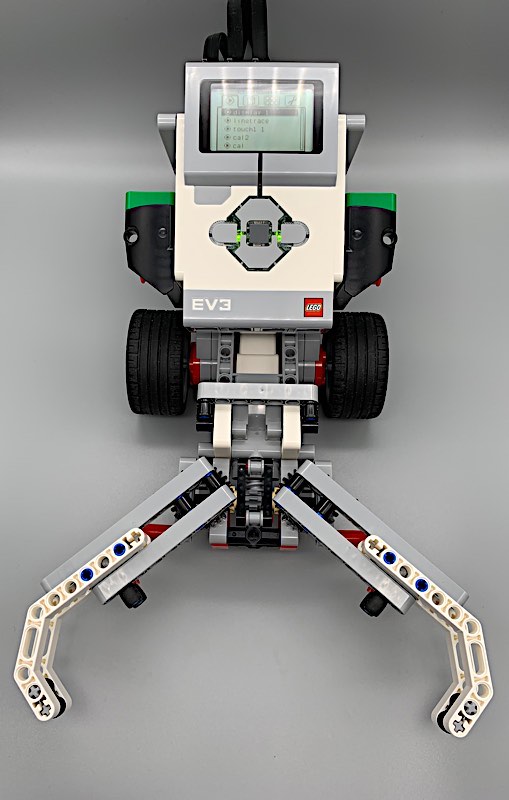
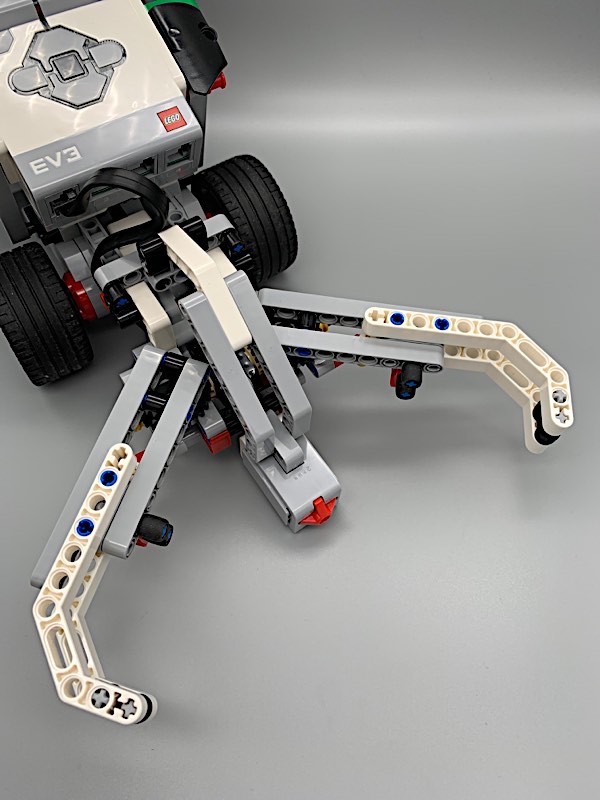
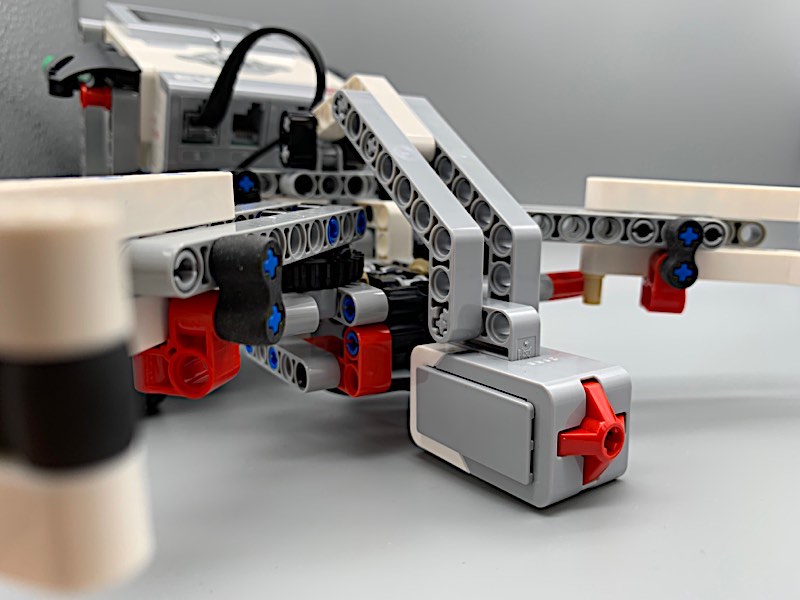
これがGripper(グリッパー )を取り付けた完成品です。
クワガタムシのようですね。
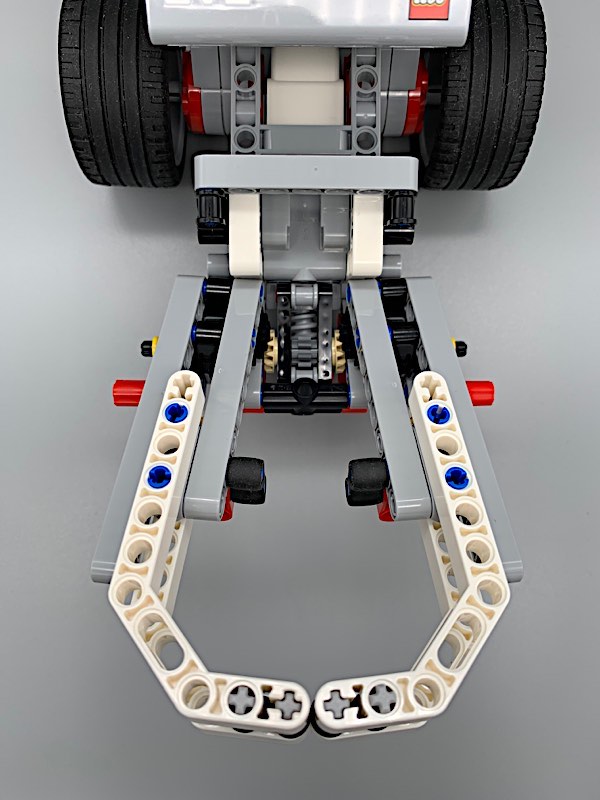
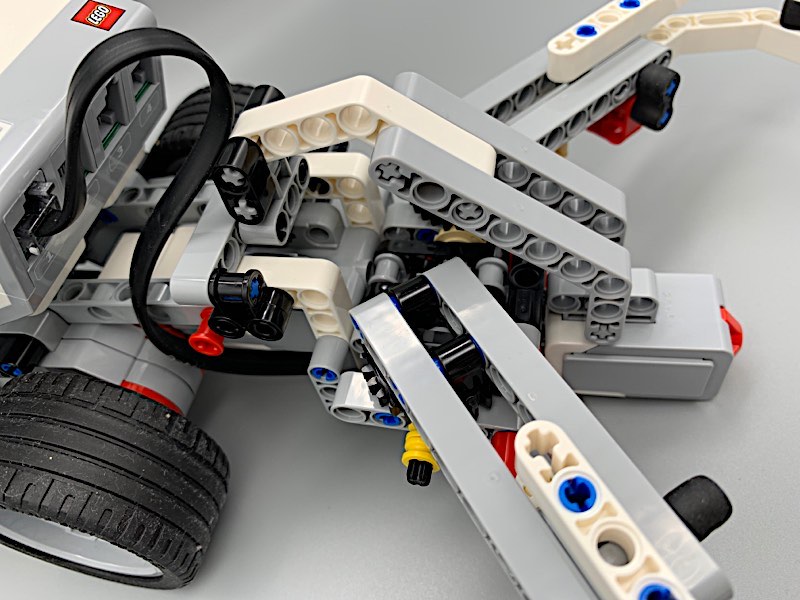
下からはこんな感じ。
Gripper(グリッパー )を開くとこんな感じ。
結構ロボットのバランス的にはGripper(グリッパー )て大きいですよね。
なかなかロボットっぽくてカッコいいですよね。
よく出来ていますよね。これ1から考えるの大変ですね。思いつかないな〜といつも感心しながら組み立ててます。

次にプログラミングですが、ここでもう1回タッチセンサーに登場してもらって、タッチセンサーを押すと開閉するプログラムを作ってみます。
ラジコンみたいな感じですね。
これが完成品。
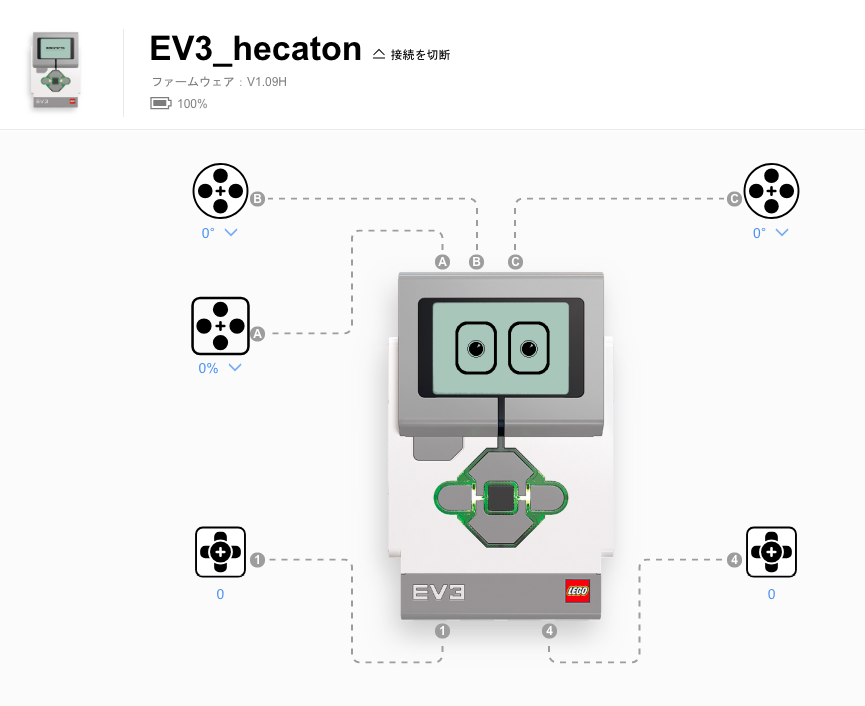
ポート1と4にタッチセンサーを接続しました。

EV3本体との接続状態は以下のとおり。
ポートAにGripper用のモーターLが接続されています。
今回のプログラムではこのモータLのポートAとタッチセンサーのポート1・4を使います。
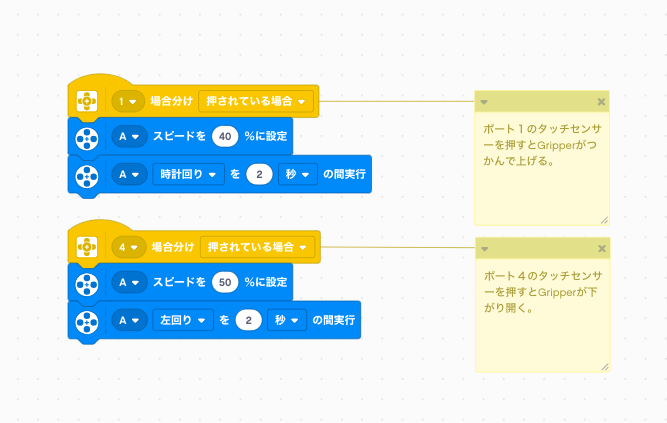
とりあえずは、こんな感じのプログラムを作りました。
これで2つのタッチセンサーを使い分けて、Gripperを開いたり閉じたりするラジコンマシンが出来ました。
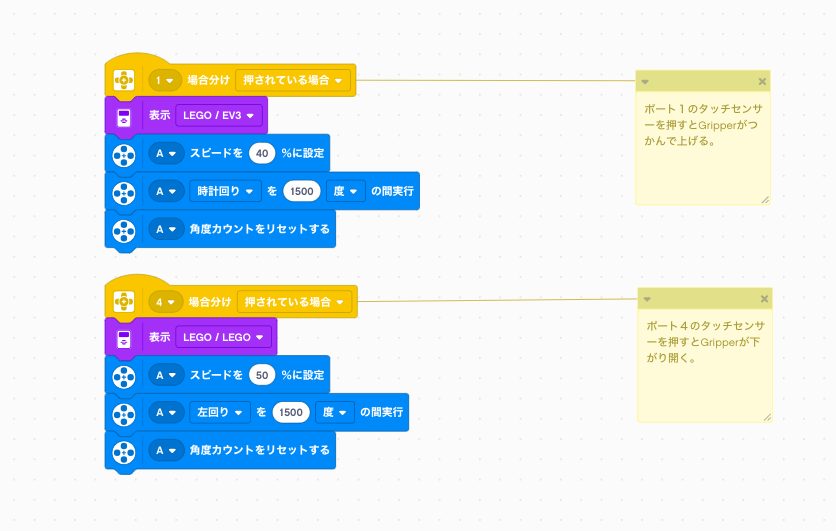
何回か実際に動かしてみてちょっと改良してみました。
さっきは秒数でしたが、今度はモーターLの回転角度で開いたり閉じたりを指定しています。
あと開く時と閉じる時で本体ディスプレイへの表示を変えてみました。
これだけでたいぶ遊べます。中身の入ったペットボトルは持ち上げられませんが、空のペットボトル程度なら持ち上げられます。
次にGripperの自動開閉に挑戦してみます。
動作ポイント
・本体がGripperを開いたまま直進
・何か物がタッチセンサーに触れたら一度移動を停止
・Gripperを閉じて物をつかみ、持ち上げる
・持ち上げたまま後進。
・物を下ろしてgripperを開く
・再度後進
ここまでを自動化します。
それには、今のGripperの車台にタッチセンサーを新たに追加してあげます。
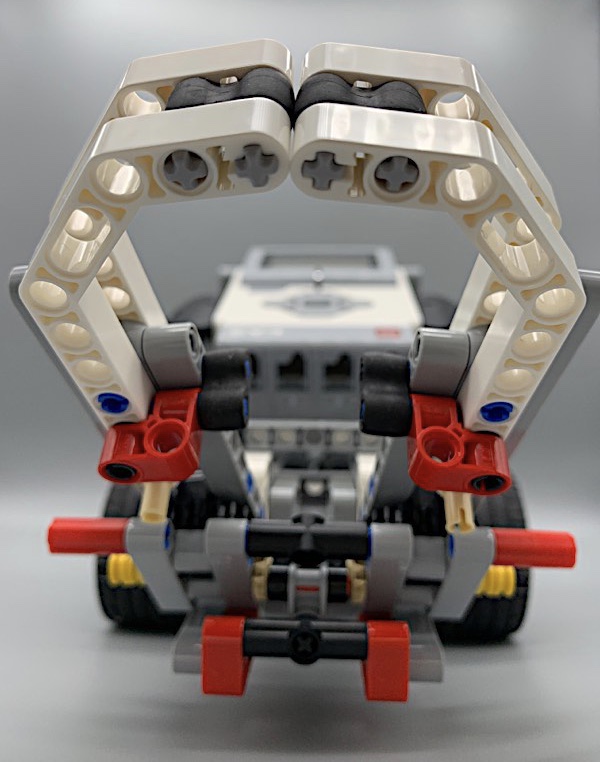
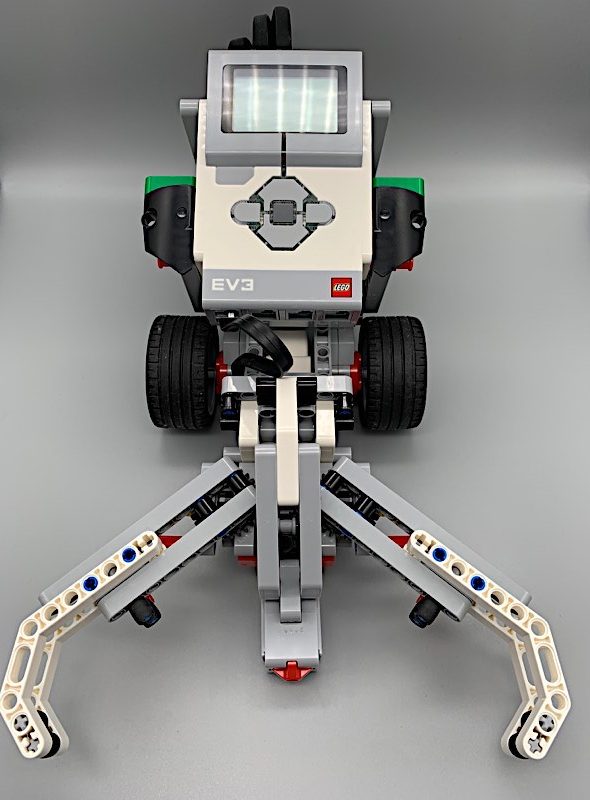
こんな感じにGripperの真ん中にタッチセンサーを配置しました。
アーチ状にぶらさげる感じ。
いかつい感じになりましたね。
本体が前進している途中で、真ん中に物がきてタッチセンサーに当たると、本体は前進を停止しGripperが閉じるプログラムがスタートします。
で、プログラムしてみました。
気をつけた事は、軽い物だと本体が直進した際に倒れてしまうので、移動スピードを抑えめにすることですかね。

さ、これでプログラムスタートです!!
ちょっとワクワクしますね。ちゃんと動くかな〜。
動画掲載はまた今度。
いやーなかなかタッチセンサーにちゃんと当たる、ちょうど良い重さの物がないですね。
ただ、指で支えてあげれば確かにプログラムどおり、Gripperでつかんで後退してはなしますね。
成功です!!
はい、今回はEV3 ClassroomでGripperを使った物をつかむ、はなすといった動作の自動化編でした!!
EV3に興味をもったら教育版EV3を検討してみてください。
私は正規代理店のAfrelで購入しました。Amazonですとホビー版が購入できます。付属するセンサーなどが異なるので注意です。
10歳からの「教育版レゴ マインドストーム EV3 for home by アフレル」
