
今回は「Frsky Taranis X-Lite S」を合法的に利用するためのハードが全てそろったので、各ソフトウェアを使ってプロポでドローンを飛ばすための設定をします。
OPENTX とBETAFLIGHT の設定なので、今回長めの内容になります。
とにかく設定をする際にプロポ側とドローン側の設定内容を記事分割するとわからなくなるので、一気通関で記載しました。
ほぼ自分用に備忘録的に記載してますので、レースとかは意識してませんのでご了承ください。
では、始める前にハードのおさらい。
準備する機器は以下でした。
Frsky Taranis X-Lite S



【2個セット】HIBATT IMR18500 1100mAh 20A

そうそう、あとSDカードね。

組み合わせ

![]()
あ、その前にプロポの操縦モードの「mode2」の設定を忘れていました。
mode2は左側のスティックをスロットル(上昇下降)とラダー(旋回)にする設定でした。
この設定には物理的に「六角穴付き止めねじ(通称 イモネジ)」を所定の穴にねじ込んでスティックのバネを無効にしてやります。
使うイモネジは付属品のビニールに入ってます。
 これね。
これね。

こいつをプロポの正面からだと左側の裏にある穴に入れて六角レンチ1.5mmでねじ込みます。
こんな感じ。
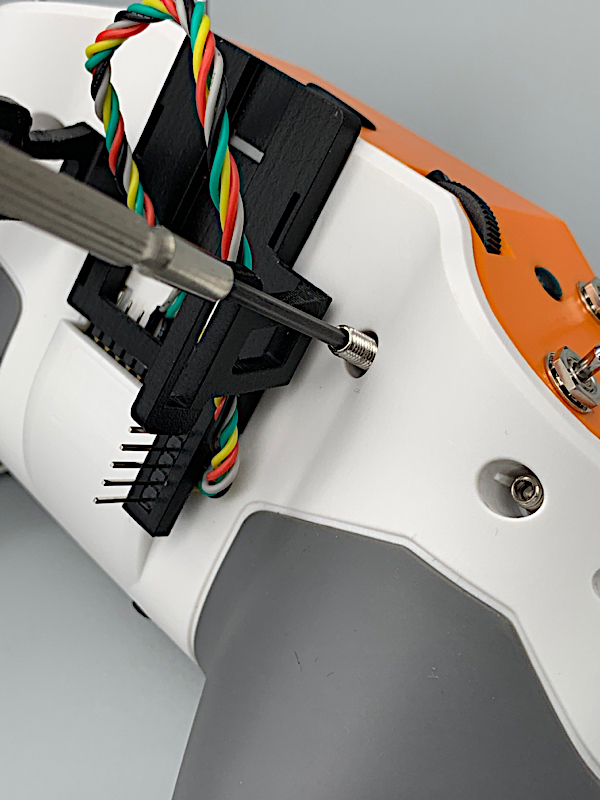
けっこう奥までねじ込みました。
すると左側のスティックが下に下がったままになります。

調整する前にはこんな感じでスティックは中心で直立不動です。
調整前
調整方法はFrSkyのWebにありますので参考に。
![]()
では前置きが長くなりましたが、ソフトウェアの設定に入ります。
設定の順番はざっくりこんな感じ。
設定はMacOSでの設定です。
step
1プロポの設定
![]()
「Frsky Taranis X-Lite S」に搭載されているオープンソースファームウェア「OPENTX」の各種設定を行う。
- 「Frsky Taranis X-Lite S」のファーム更新
- Model設定 等
step
2外部モジュールの設定
「Jumper JP4IN1 Multi Protocal Radio Transmitter Module」のファーム更新
step
3ドローンとプロポのbind(接続)
前の設定でプロポとドローンのプロトコルが合っていれば接続できる。
ドローンに使われているFC(フライトコントローラー)のbind手順を確認。
step
4ドローンの設定(BETAFLIGHT)
![]()
「Betaflight Configurator」というソフトウェアを使用して、ドローンのファームウェアの設定を行う。
前の工程でbind出来ていれば、このドローンの設定でプロポの操作とドローンの設定が合っているか確認出来る。
step
5ドローン離陸!!
さあ、これで準備はOK!!飛ばそう!!
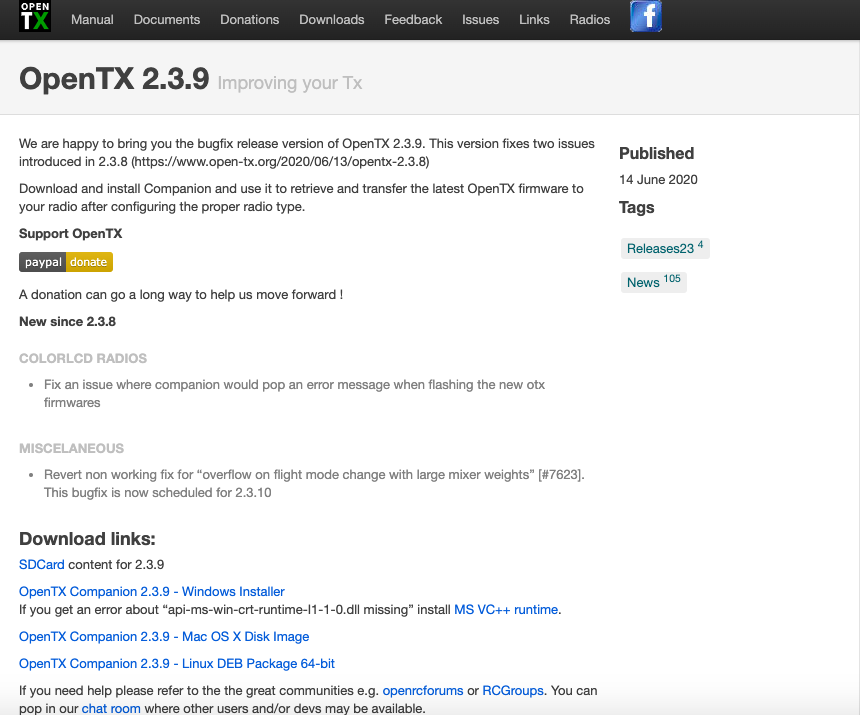
ではでは、Step1 プロポの最新ファームのDLから。
https://www.open-tx.org/ から最新のVerをDL。
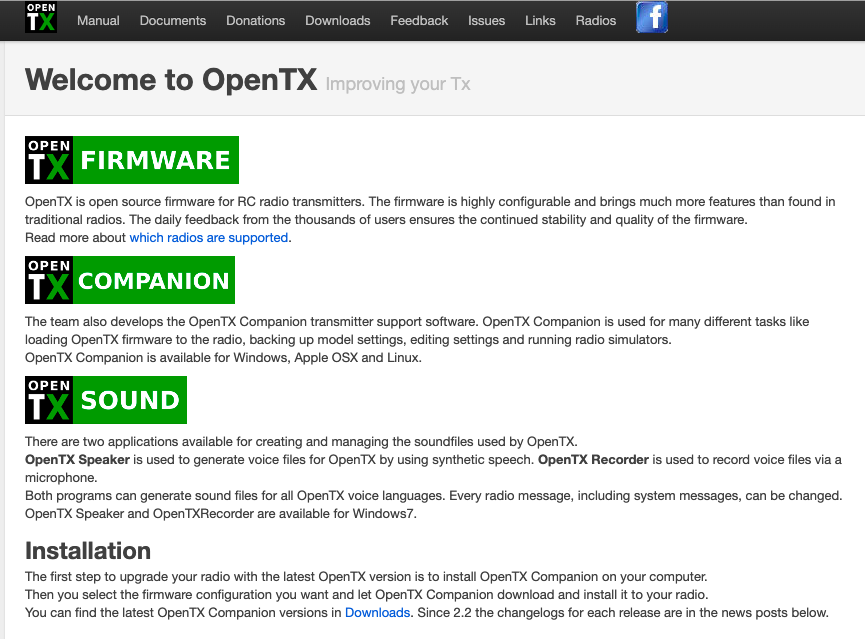
2020年8月11日現在は OpenTX 2.3.9 (2020-06-14) が最新ですね。
私はMacなので以下を選択。自分のOSに合った物を選択しDL。
OpenTX Companion 2.3.9 - Mac OS X Disk Image
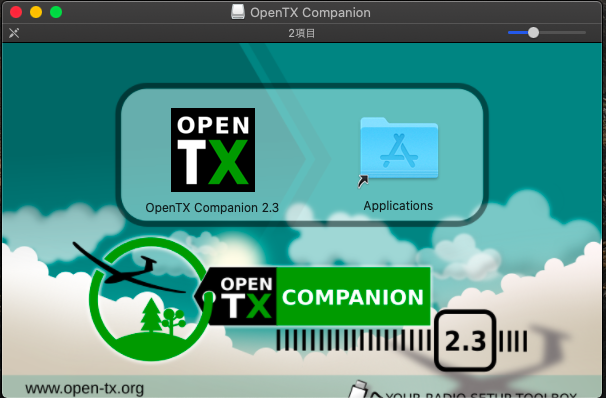
これを展開すると・・・「OpenTX Companion2.3」というツールをApplicationsに入れろと出てきますのでドラッグして入れてやります。
Windows、Mac OS、Linuxで動作します。
この「OpenTX Companion2.3」はOPENTXのファームウェアをダウンロードしてインストールしたり、プロポのファームウェア、ドローン毎のモデル、SDカードの内容をバックアップしたりできます。
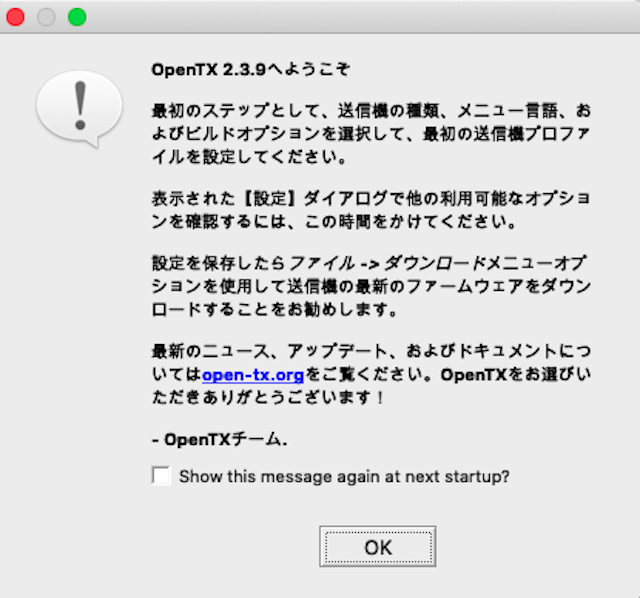
「OpenTX Companion2.3」を開いて初期設定します。
OPENTX 2.3.9へようこそ!!
赤枠で目印を付けたボタン「送信機プロファイル」を押すと下の画面になりますので、完全に新規作成の場合は「新規 送信機」を選択。
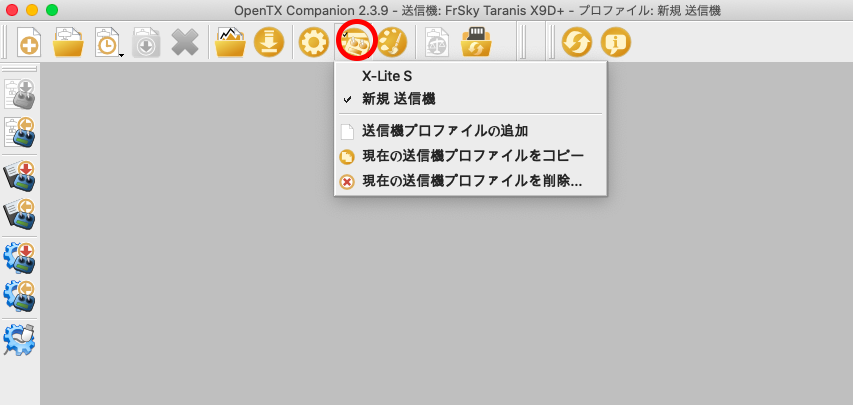
次にプロポのファイル名やプロポの種類を選択。
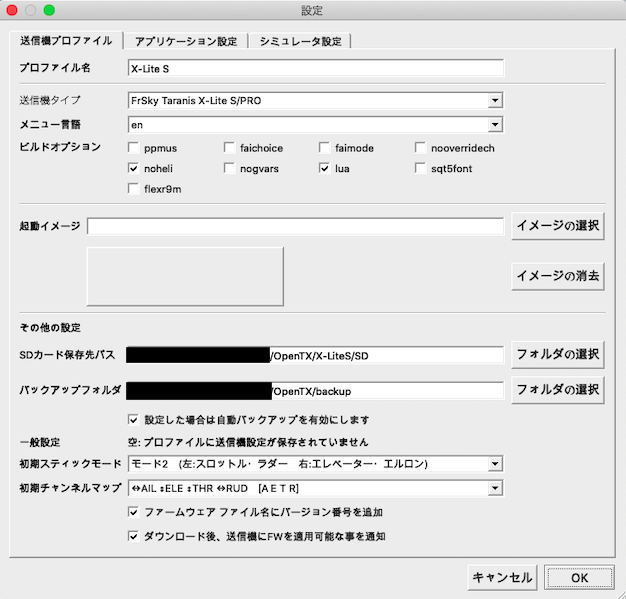
表示されているビルドオプションは、下記のような用途なので必要なOptionだけ☑️を入れました。
| カテゴリ | オプション名 | 設定内容 | 設定 |
| ALL radios | ppmus | Displays channel values in microseconds instead of %
%ではなくマイクロ秒でチャネル値を表示 |
ー |
| faichoice | Adds a menu entry in the radio general settings to enable FAI mode.
FAIモードを有効にするために、無線の一般設定にメニューエントリを追加 |
ー | |
| faimode | Disables all telemetry except for RSSI and voltage, for compliance with contest regulations.
RSSIと電圧以外のすべてのテレメトリ表示を無効にする。コンテスト等、およびレコード設定アクティビティに関するFederation Aeronautique Internationale(FAI)規制に準拠する。 |
ー | |
| nooverridech | No OVERRIDE CHx functions available.
チャネル出力オーバーライド機能を削除する。 ミキサーからの値を無視して、チャンネル出力を特定の値に設定する。 |
ー | |
| FrSky Radios | noheli | Removes the Heli CCPM mixer menu page.
Heli Cyclic Collective Pitch Mixerメニューページを削除 |
☑️ |
| nogvars | Disables global variable support and the associated menu page.
グローバル変数のサポートと関連するメニューページを無効 |
ー | |
| lua | Support for lua model scripts.
ミックス/ミキサースクリプトに必要なLuaカスタムスクリプトページを表示 |
☑️ | |
| FrSky Taranis | sqt5font | An alternative display font.
sqt5フォントを利用。好みかな・・・ |
ー |
| FrSky R9M | flexr9m | R9Mモジュールを利用しFlexファームウェアを設定する場合 | ー |
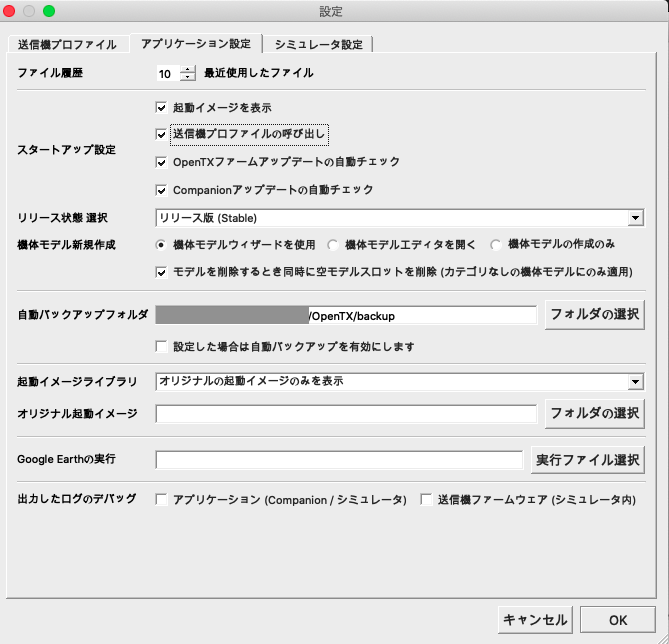
次がアプリケーション設定タブです。
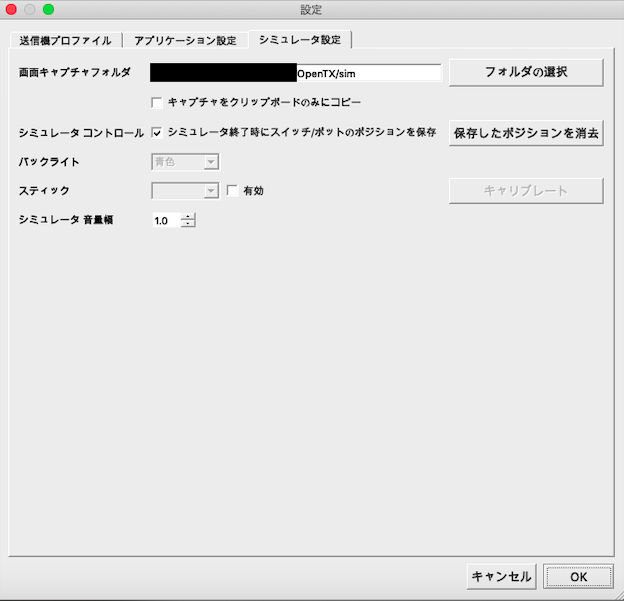
最後にシュミレータ設定タブ。
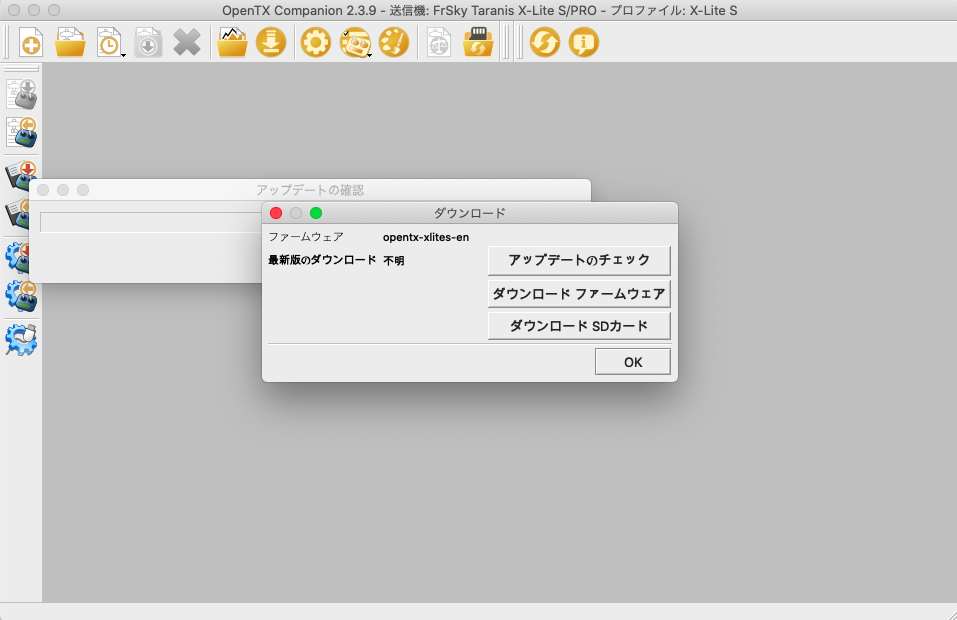
ダウンロードボタンを押してファームのダウンロード。

さ、ここでPCとUSBで「Frsky Taranis X-Lite S」を接続して書き込むのですが、Bootloaderモードで起動する必要があります。
その前にスイッチ類の名称等はマニュアルから確認。
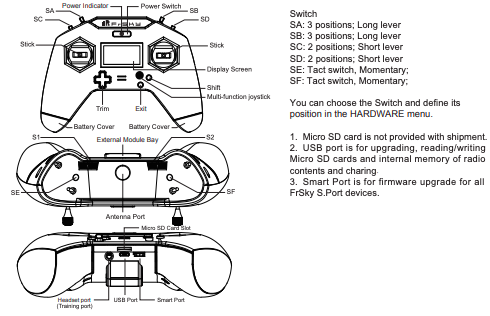
このモードは起動時に十字キー(Trim)と電源ボタン(Power Switch)を同時押しにすると以下のような画面になります。
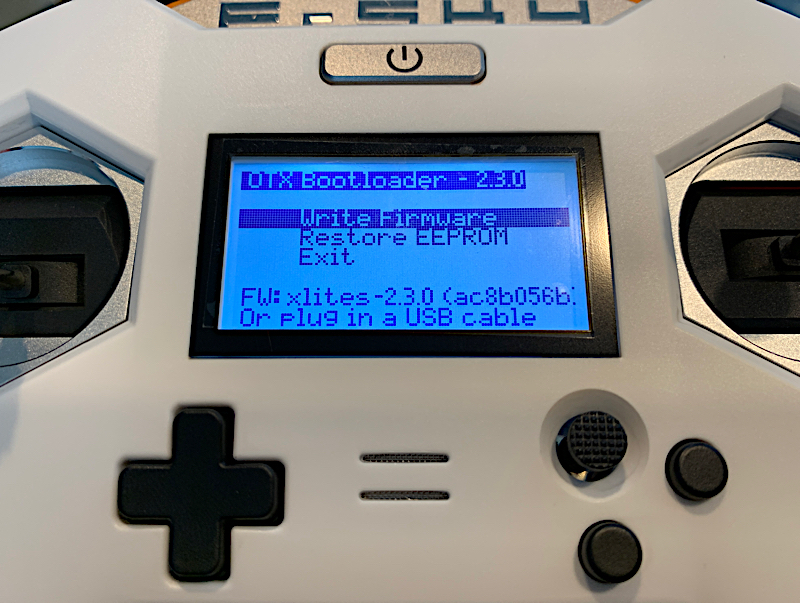
このモードでUSB接続し、書き込みます。

あとプロポで制御するドローン毎の設定もします。
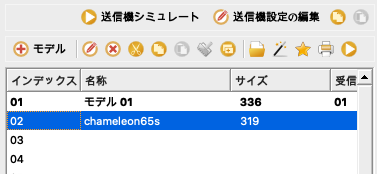
送信機から機体モデルの読み込みボタンを押すとこんな感じでデータが取れます。
現状まっさらな状態です。
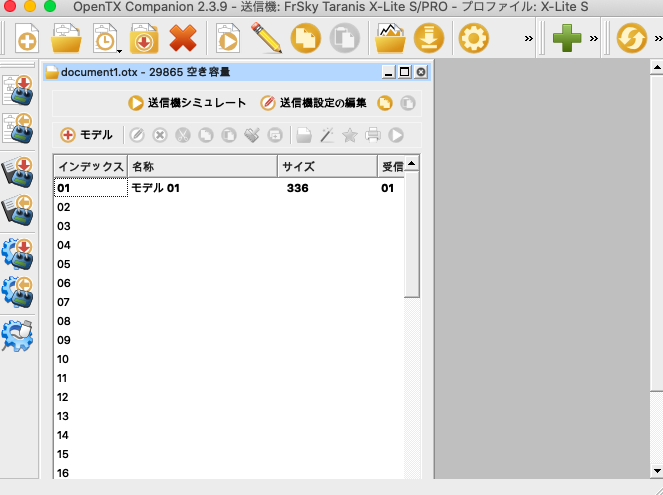
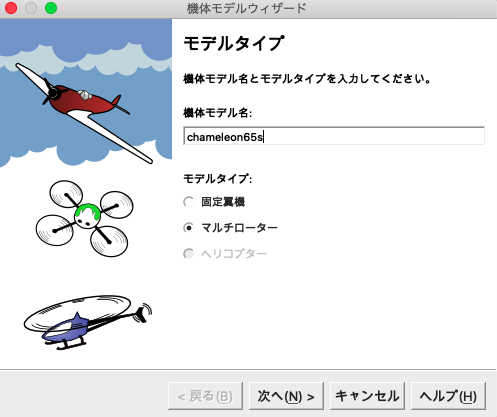
インデックスで登録したい番号の蘭をダブルクリックして機体モデルウィザードを起動。
ここで設定したいのはこのドローン。

-

-
【 Tiny Whoop】Beta65S Chameleonで自作するよー(本体完成編)
さ、本体組立の最後ですね。 まず前回までにモーターを取り付けたフレーム FCとFPVカメラ そしてバッテリー あと細かいパーツですが、プロペラ そしてキャノピー これら全てを合体!! フレーム+FC+ ...
続きを見る
FCはBETAFPVのF4 Brushed Flight Controller (Frsky Rx)です。
ドローンなのでマルチローターを選択。
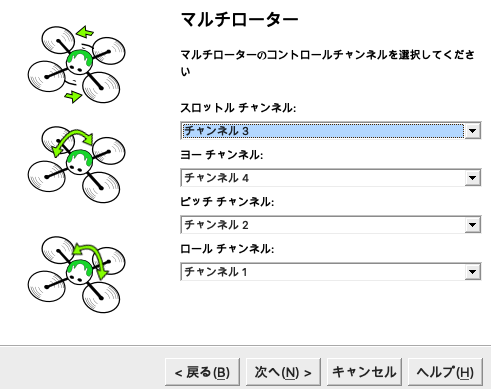
AETRの設定。
optionは特にいらないかな。
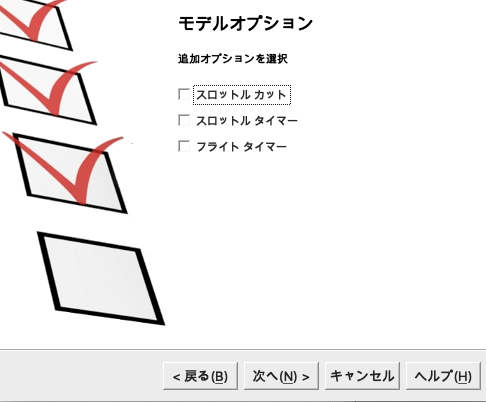
これでOKにチェックいれて完了。
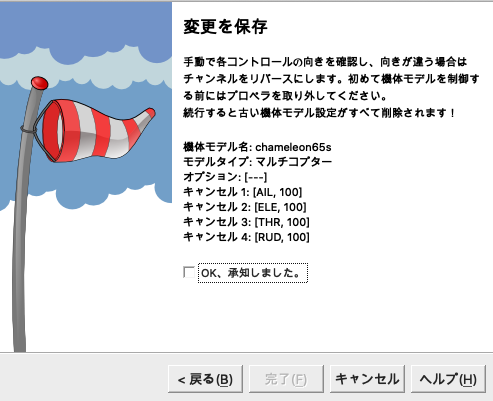
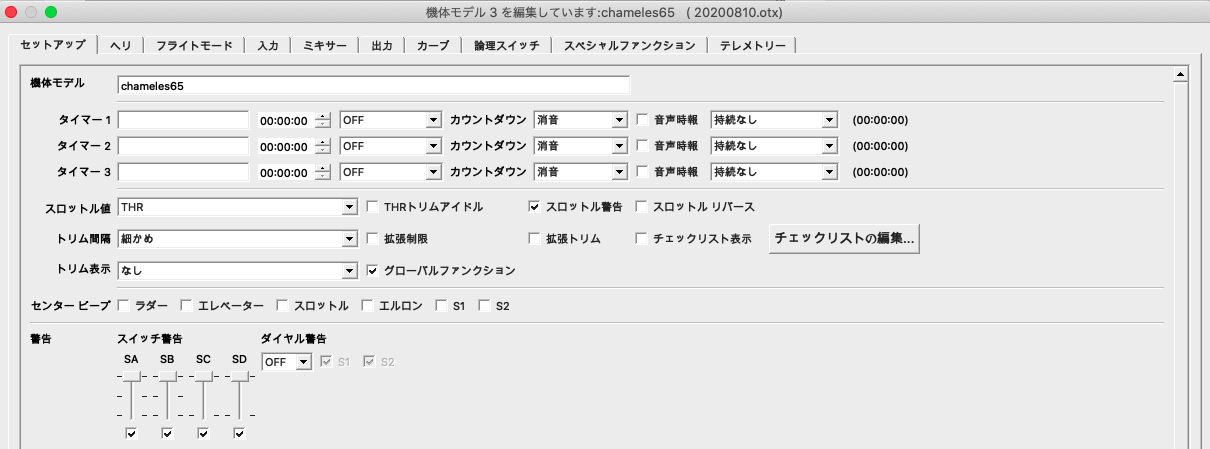
で、次に詳細を設定していきます。
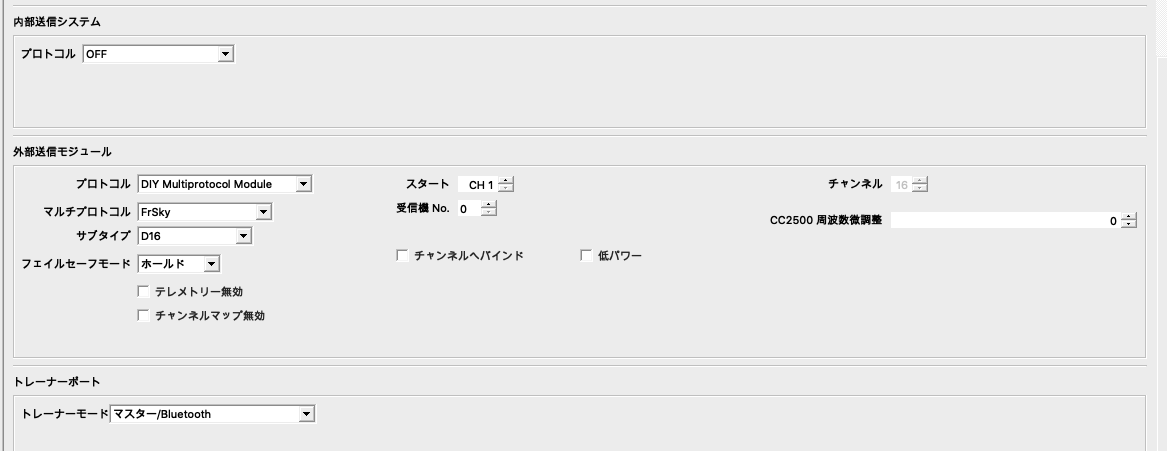
これが詳細画面ですね。
ここで今回内部送信システムは利用できないのでOFFのまま。
合法的に利用するための外部モジュールを取り付けたので、プロトコル等は以下の設定にしました。
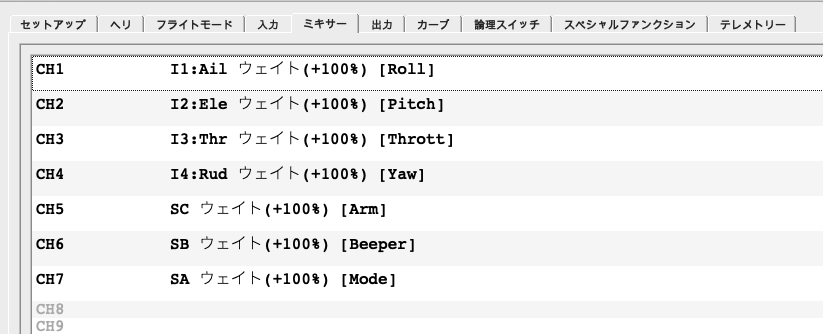
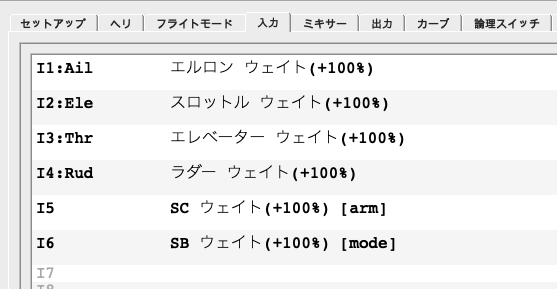
ミキサータブですが、私はこんな設定にしました。
CH5をSCにして「ARM」(モーターのON/OF)にしました。2position switchなのでON/OFFには最適かなと。
CH7をSAにして「Mode」(Angle(アングル)、Horizon(ホライゾン)、Acro(アクロ))にしました。
SAは3position switchなので3種類のモード設定には最適かなと。
書き込んだら、あとは時刻等の設定します。
この画面で右下のMULTI-FUNCTION JOYSTICKを左に傾け続けると設定画面になります。ここは簡単なので割愛。
OPENTXの設定は完了した、かと思いきや・・・
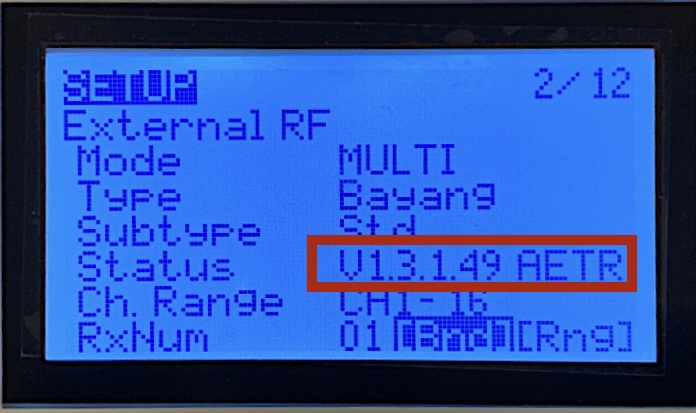
下の画面のstatus(赤枠内)に MULTI-Module firmware versionが表示されますが、外部モジュールのアップグレードを促されました。
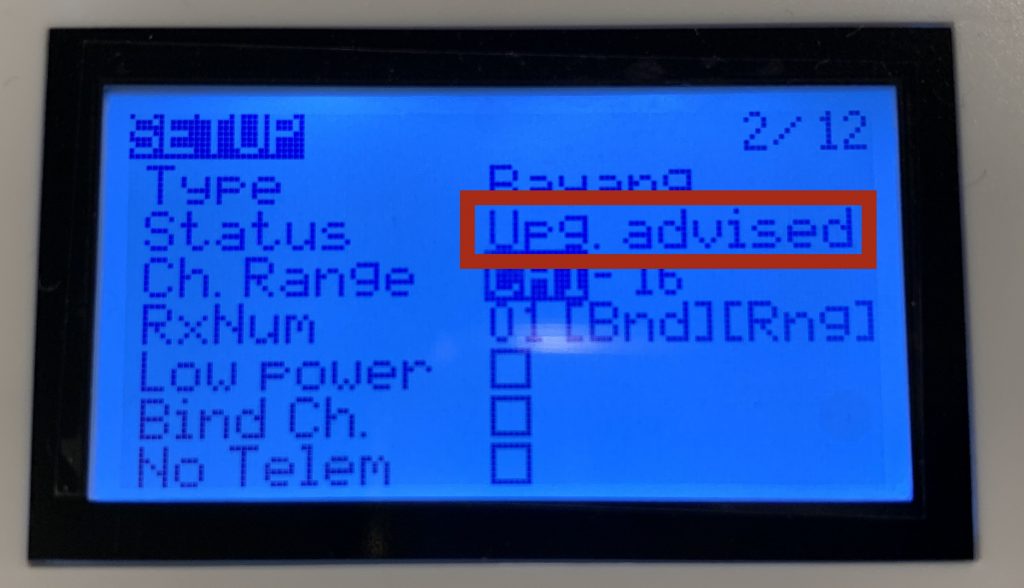
じゃあ最新の状態が良いので更新するか。
ということでStep2の「Jumper JP4IN1 Multi Protocal Radio Transmitter Module」のファーム更新をします。
-

-
【 Tiny Whoop】Jumper JP4IN1 モジュール キターーーー!!
前回は「FrSky Taranis X-Lite S」を購入したレビューでしたが、あれだけでは動作出来ません。 今回は日本で合法的に利用するためのモジュールが届いたのでそのレビューになります!! Fr ...
続きを見る
まずgithubのこちらにアクセス。
https://github.com/benlye/flash-multi/releases
ここでwindowsの場合は「the MULTI-Module drivers」をDLしてインストールします。
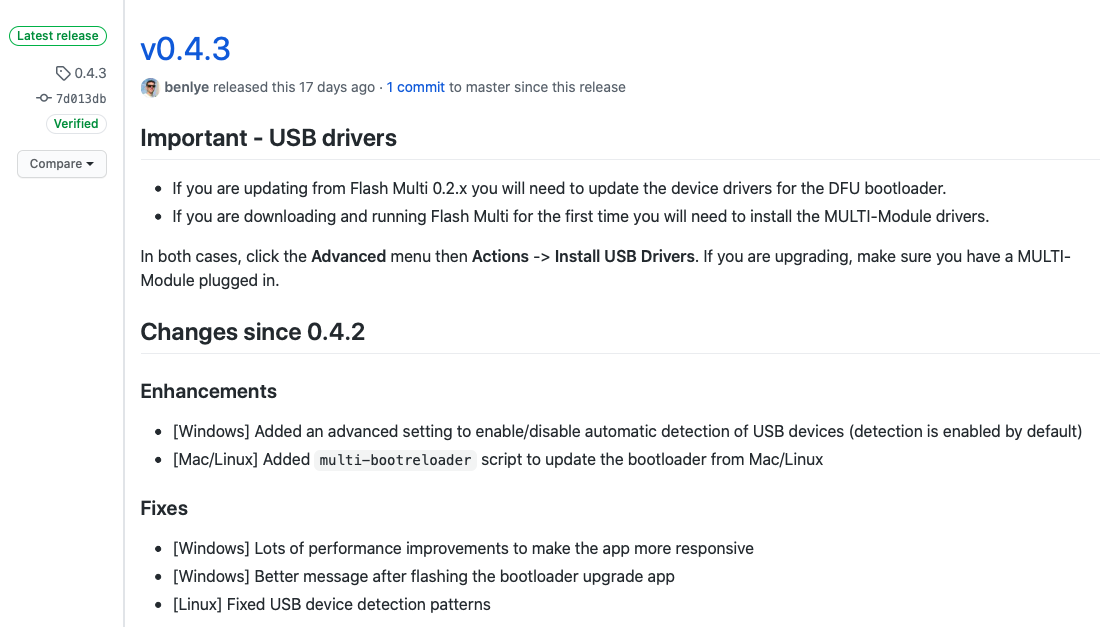
私はMacなので、SDカードにファームウェアを入れてプロポ上で更新する方法を取ります。
まずファームウェアを以下からDLします。
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module/releases
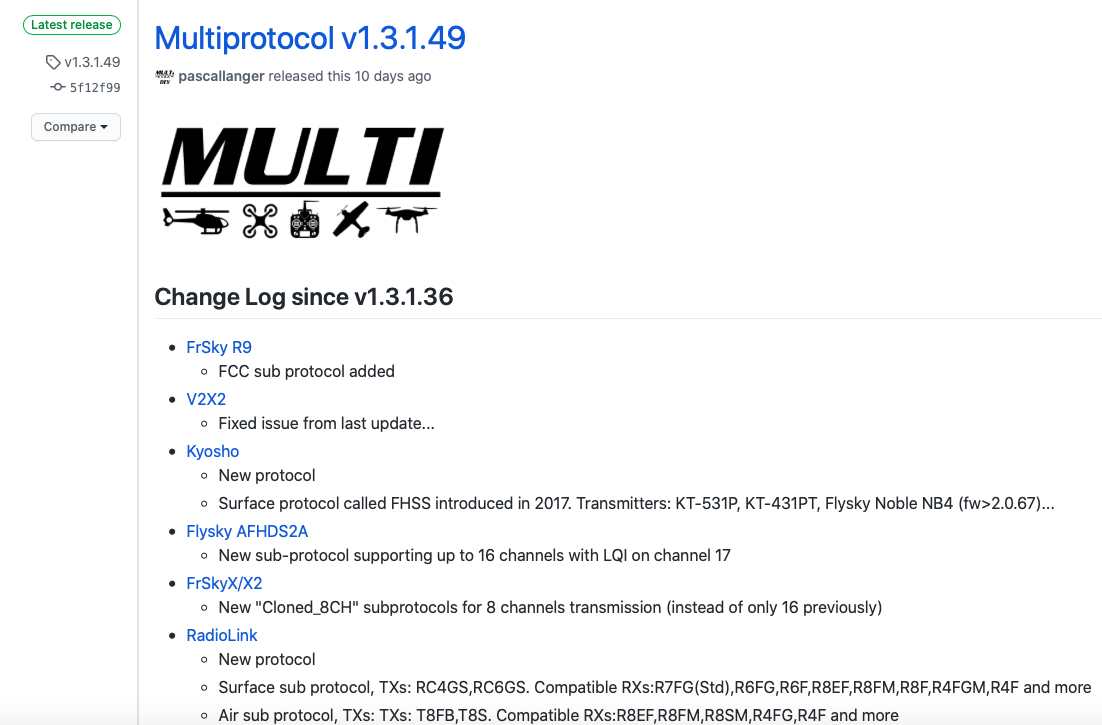
ここで問題は、どのファームウェアを選択すれば良いか、ということです。
やたらと同じVerのファイルが並んでいます。

でもファイル名にルールがあるので大丈夫。
multi-[module type]-[radio type]-[channel order]-[telemetry inversion]-[firmware version].bin
ですが、ルールを知らなくても以下のサイトで外部モジュールを選択すれば必要なファイルにフィルタがかかるので大丈夫。
https://downloads.multi-module.org/
画面はこんな感じ。
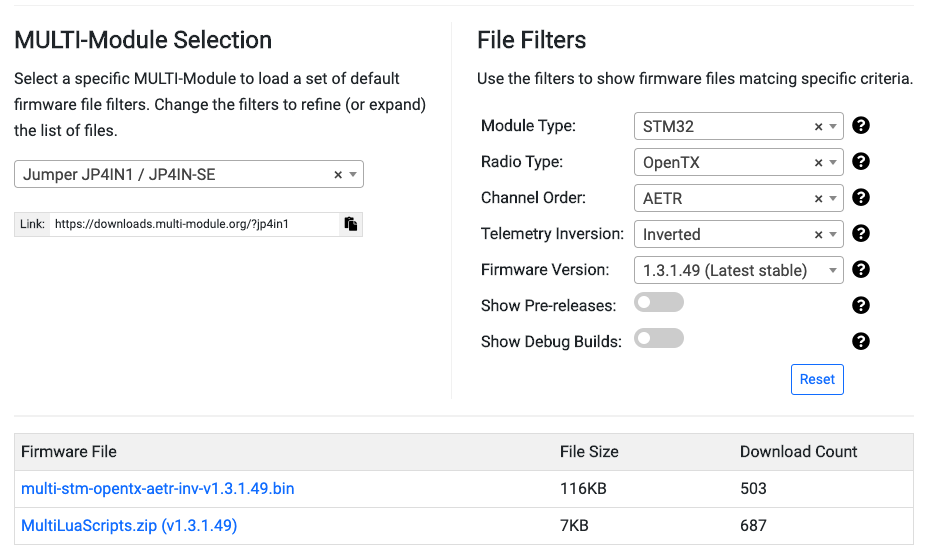
まず左側のMULTI-Module Selectiomで自分の設定するモジュールを選択。
私は「Jumper JP4IN1 Multi Protocal Radio Transmitter Module」を使うので「Jumper JP4IN1/JP4IN-SE」を選択。
そして、右側のFile Filtersで「Radio Type:」は「OpenTX」、「Channel Order:」は「AETR」、「Telemetry Inversion:」は外部モジュールなので
「Inverted」を選択。
すると必要なファイルは「multi-stm-opentx-aetr-inv-v1.3.1.49.bin」だとわかりました。
このファイルをSDカードに書き込みします。場所はわかりやすいようにSDカードの中身を開いてすぐの階層に格納。
下のような感じで入れました。

ただ、このままだとプロポ上で表示されないです。
どうもファイル名に文字数制限があるらしく、下のようにファイル名を短くしました。
「multi-v1.3.1.49.bin」
このぐらいだと表示されます。
プロポにSDカードを入れて電源ON。
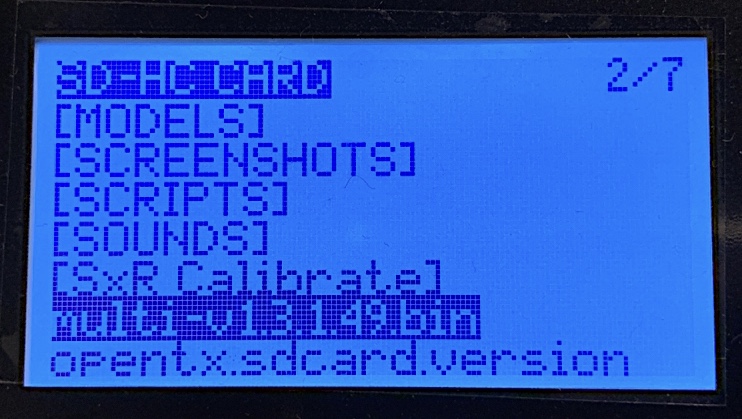
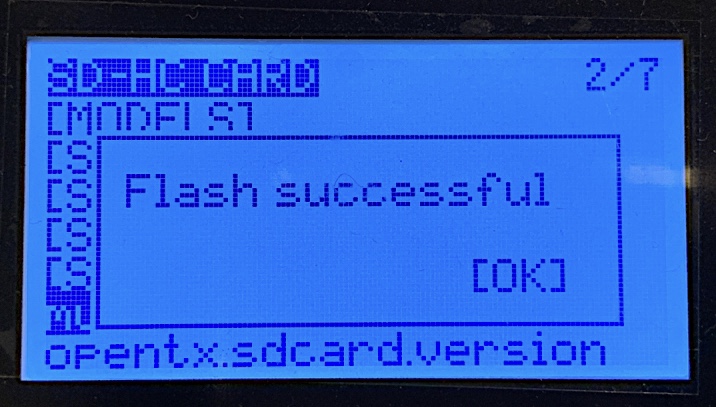
そしてプロポのMULTI-FUNCTION JOYSTICKを左に押し続けるとTOOL画面になるので、今度は画面を右に送っていくと「SD-HC CARD」という画面になります。
ここで下に画面移動してみると「multi-v1.3.1.49.bin」がありますよね。
ここで長押しすると、下の画面が出るのでこれを選択。
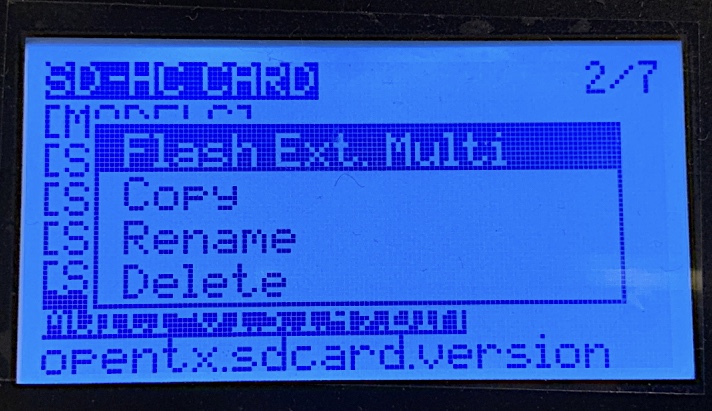
そしたらインストールが始まります。
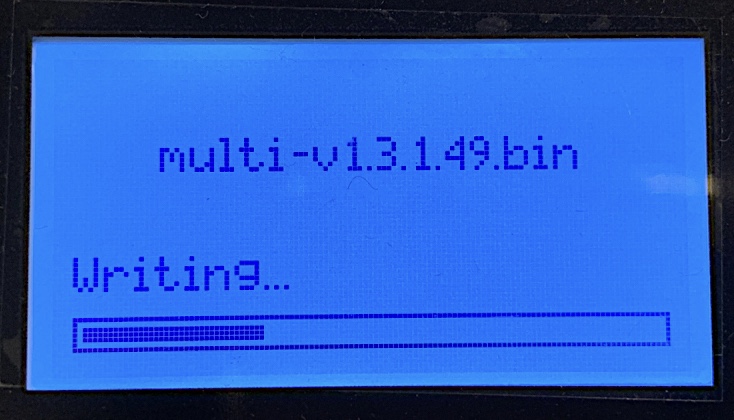
バーが最後まで行くと・・・無事成功ですね。
これで「Jumper JP4IN1 Multi Protocal Radio Transmitter Module」のファーム更新が完了。
ちゃんとStatusにV1.3.1.49 AETRと反映されてます。
次にStep3でBindですね。
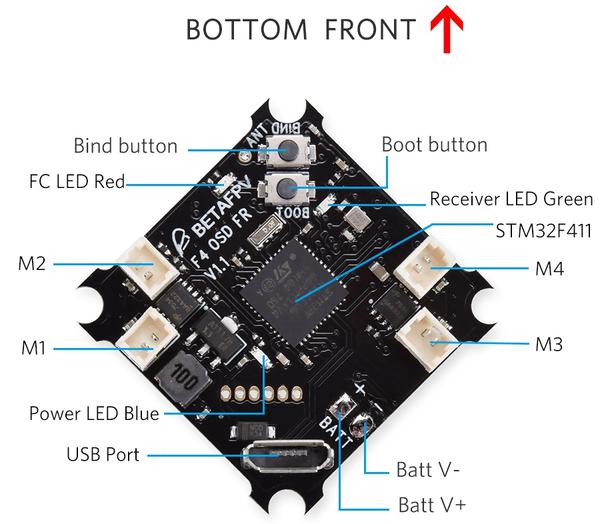
私のドローンのFCは「BETAFPVのF4 Brushed Flight Controller (Frsky Rx)」を使ってますのでバインド方法は以下になります。
メモ
1)ドローンをバッテリーで接続し、バインドボタンを押します。レシーバーLED(緑)が点灯している場合は、バインディングモードに入っています。
2)送信機で「バインド」を選択します。
3)受信LED(緑)が点滅したら、バインドは成功です。
4)再度電源を入れます。受信LED(緑色)が点灯し ます。これは、バインドが成功していることを意味します。
バインドボタンはここです。
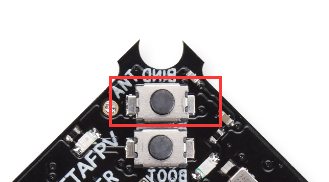 お使いのFCでバインド方法が異なるかもしれませんので確認してください。
お使いのFCでバインド方法が異なるかもしれませんので確認してください。
次にStep4ですが、やっとドローンの設定(BETAFLIGHT)です。
ちょっと休憩・・・一気通貫だと疲れますよね・・・

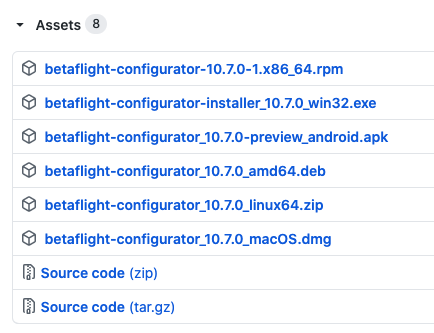
さ、続けて・・・FCのファームウェアBETAFLIGHTの設定のため、こちらから「Betaflight Configurator 」をDL。
https://github.com/betaflight/betaflight/releases
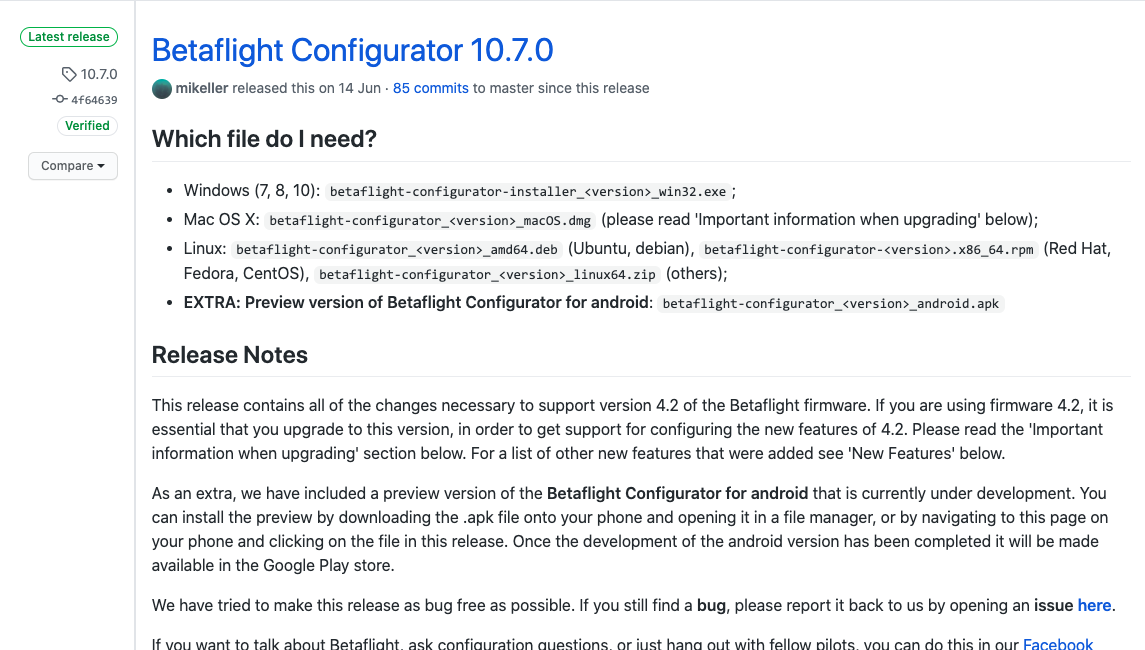
ここで私はMacなので「betaflight-configurator_10.7.0_macOS.dmg」をDL。
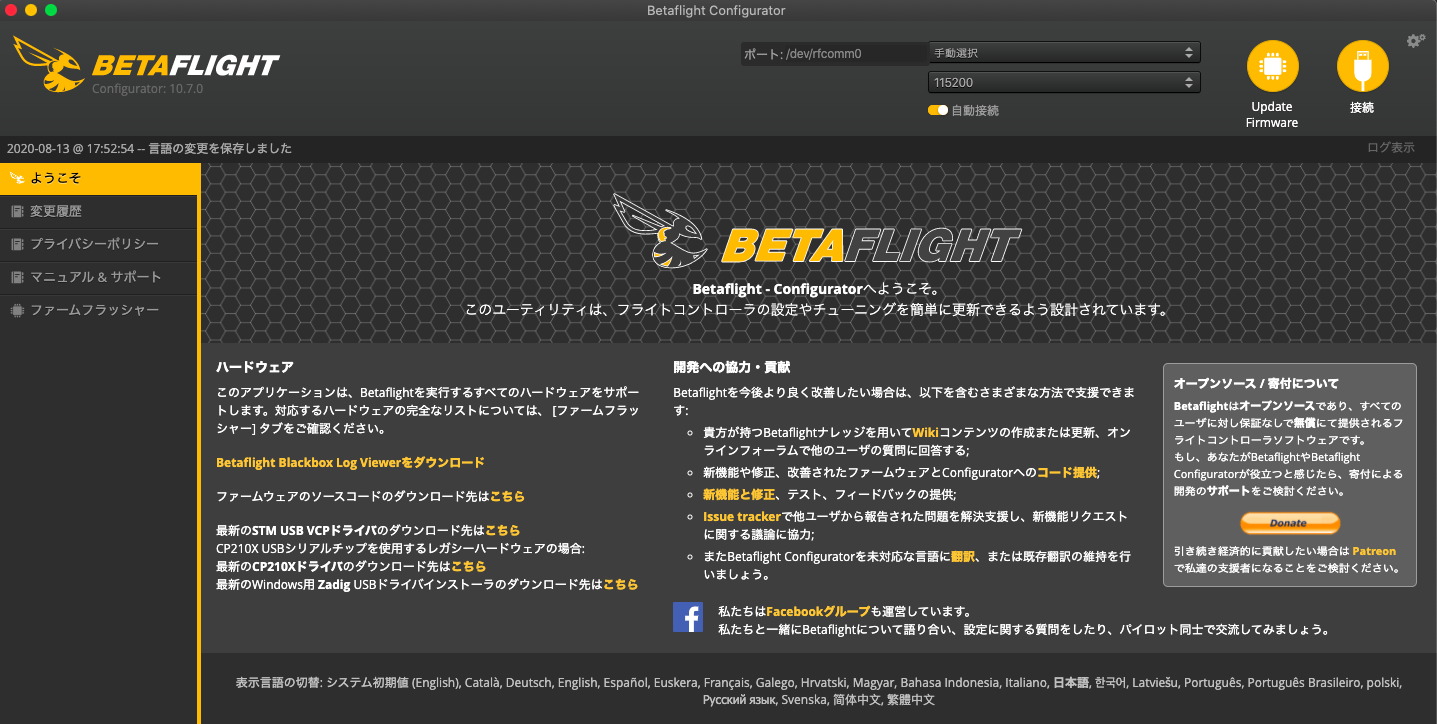
インストールしたらdefault設定が英語なので日本語に変更します。
右下の赤枠内の日本語を選択します。
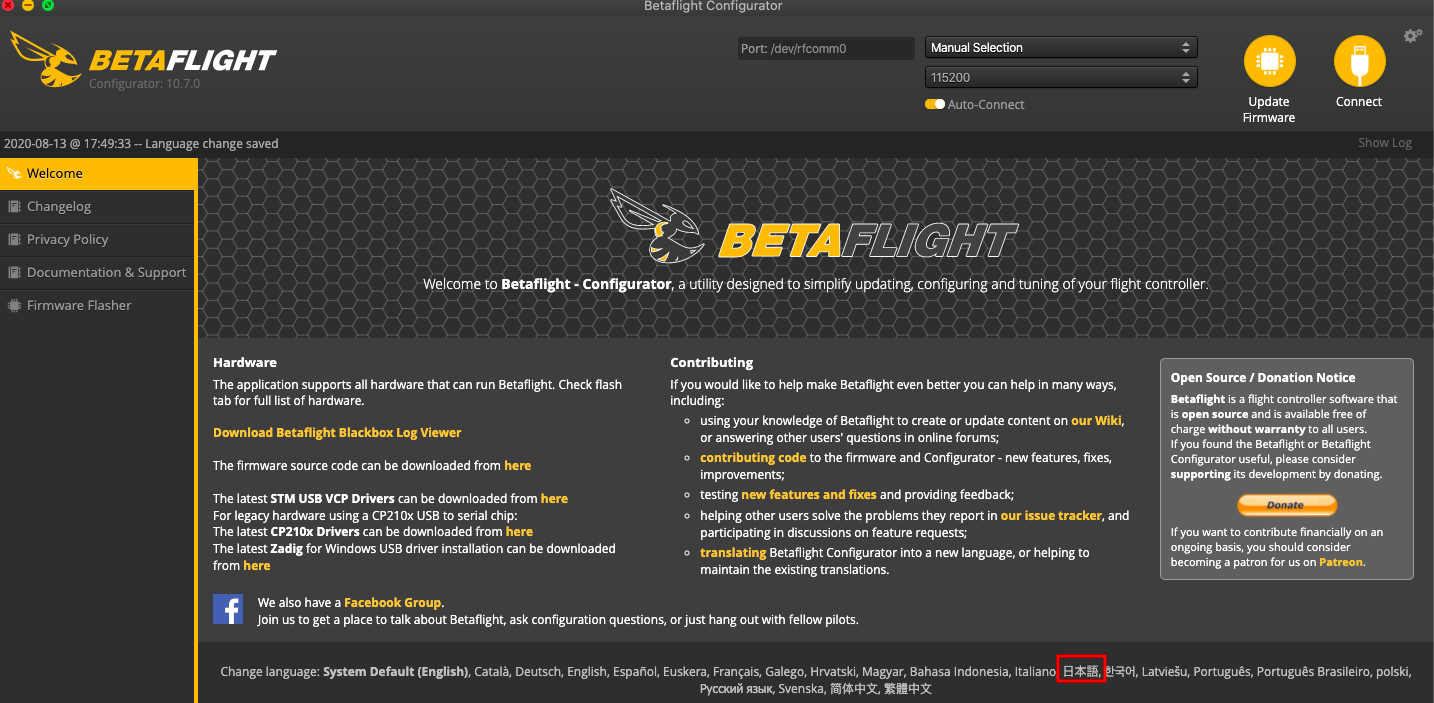
するとすぐに日本語表記になります。簡単です。
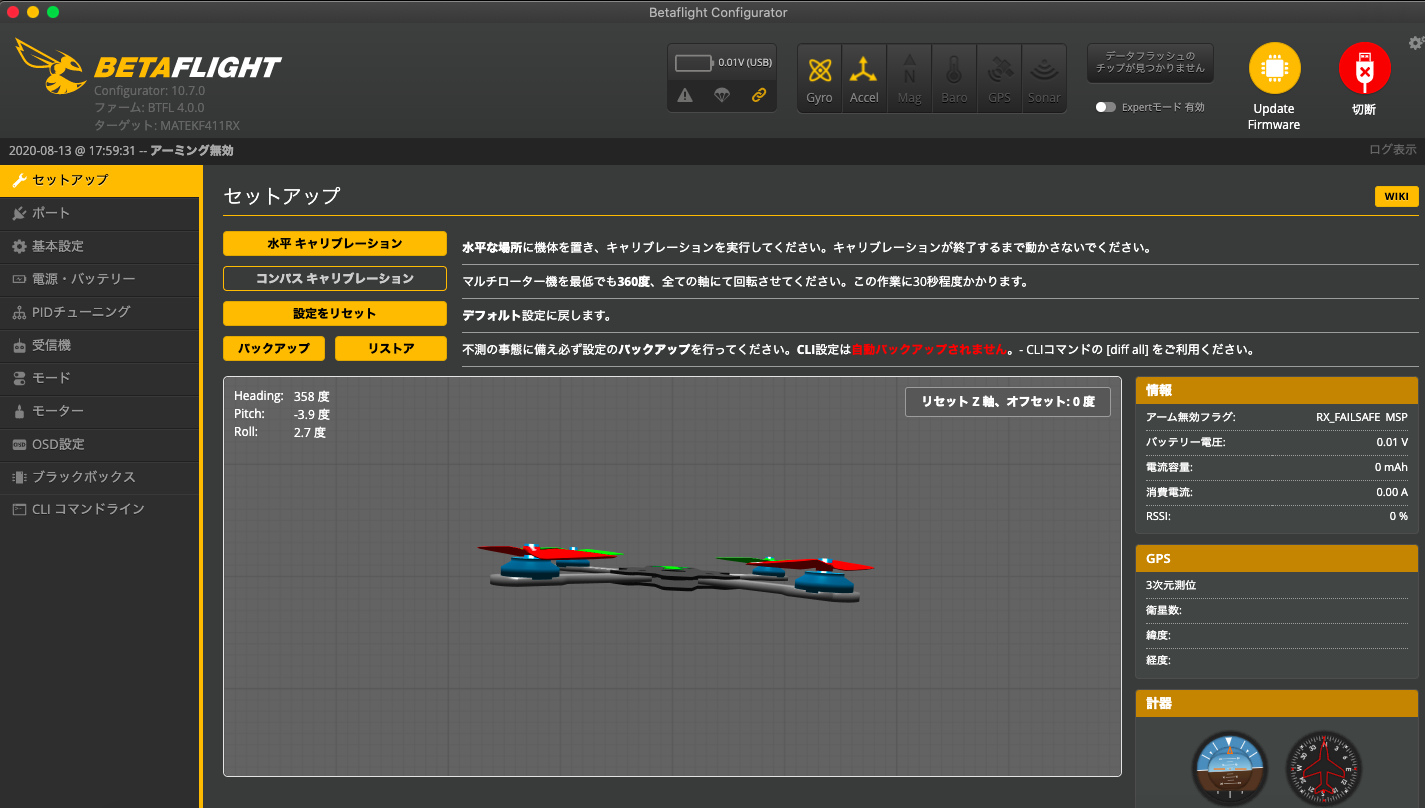
今後はドローンとPCをUSBで接続します。
接続出来たら、まず水平キャリブレーションを実施。
水平になってないと後々ARM(モーターのON)出来なかったりと問題が出てくるので。
次「基本設定」で・・・
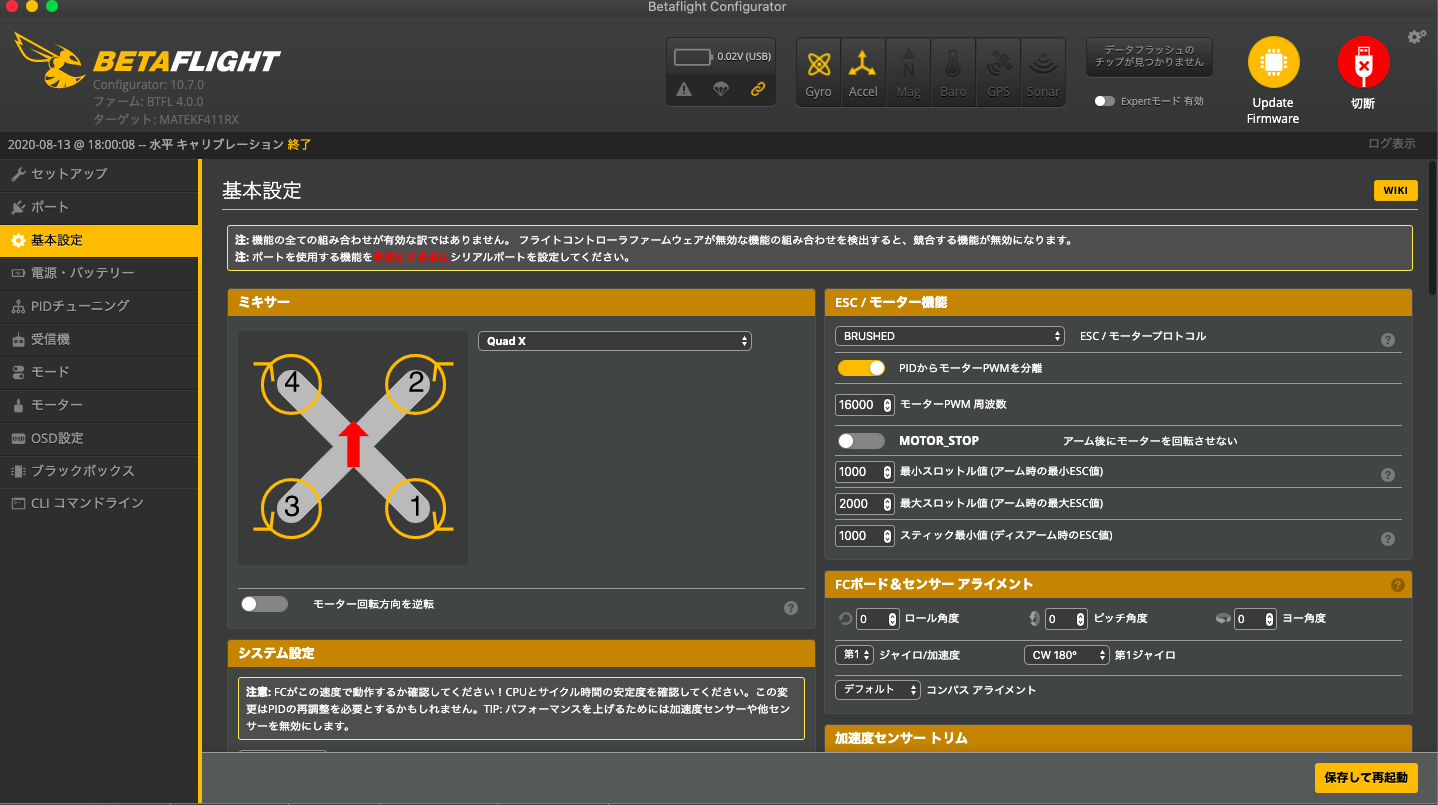
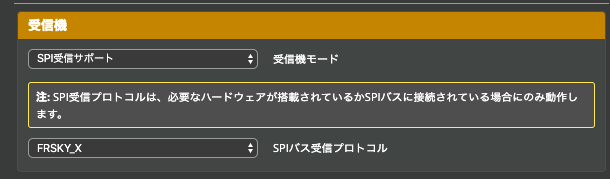
画面下の方に行くと「受信機」とあるので、ここで受信機モードを選択。
今回FCはBETAFPVの「F4 Brushed Flight Controller (Frsky Rx)」なので「SPI受信サポート」を選択。
そしてSPIバス受信プロトコルは「FRSKY_X」(Frsky D16モード)に設定。
このへんはBETAFPVのFCの製品ページに記載があります。
メモ
・BETAFPV製品ページ「F4 Brushed Flight Controller (Frsky Rx)」
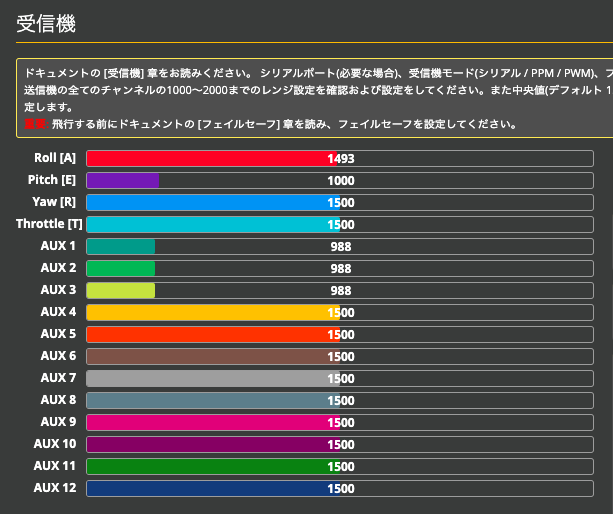
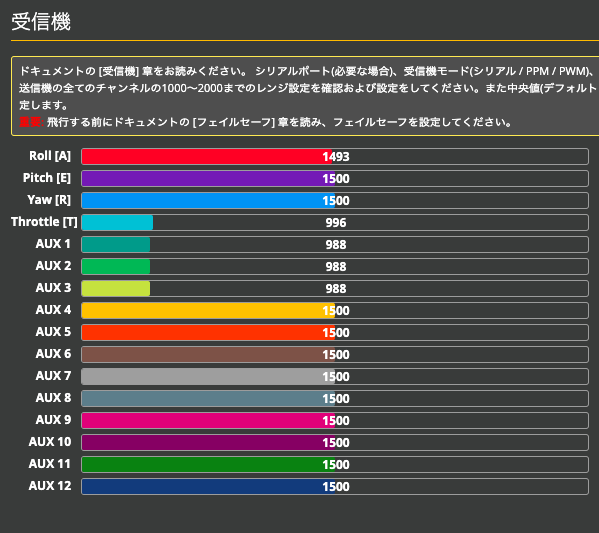
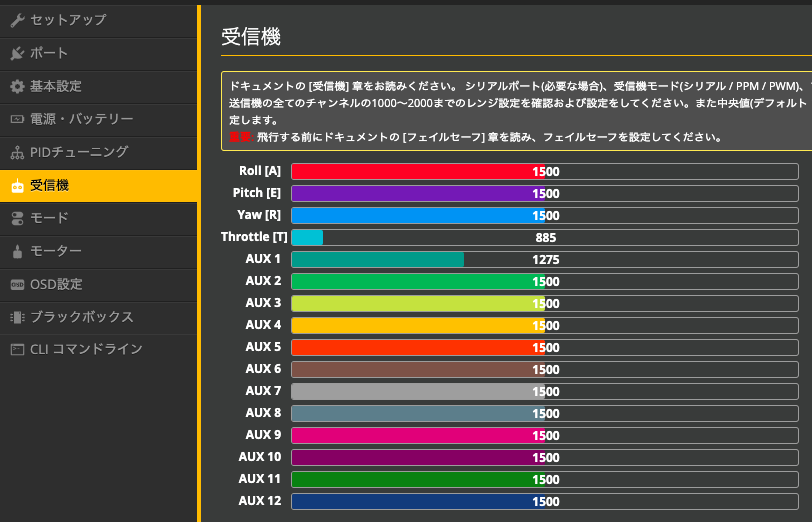
お次は「受信機」の設定。
ここでバインド状態の場合、プロポ側でスティック等各種スイッチ類を動かすと、下の各種対応した色のバーが左右に反応しますので、正しく動くか確認します。
プロポ側の設定
今回はCH2のPitch[E]とCH3のThrottle[T]が逆転していました。
Throttle[T]は下がった状態になっているのですが、Pitch[E]がその状態になっています。
これをプロポ側で変更しました。TとEを逆に設定。
設定変更後は正しくスティックが動作しています。
今回はCH2がThrottle[T]、CH3がPitch[E]になった状態。
ただ、CH1のRoll[A]の中間値が「1500」のところ、現状「1493」ですので、ここの微調整をする必要があります。
ここで、プロポの設定に一旦戻ります。
この画面から右にMULTI-FUNCTION JOYSTICKを倒し続けて・・・
「OUTPUT」画面に行きます。
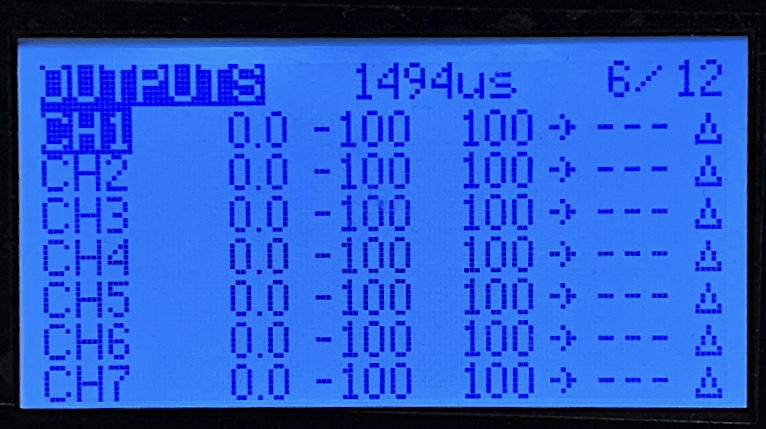
CH1を1500に合わすために、Subtrimを調整して1500に合わせました。
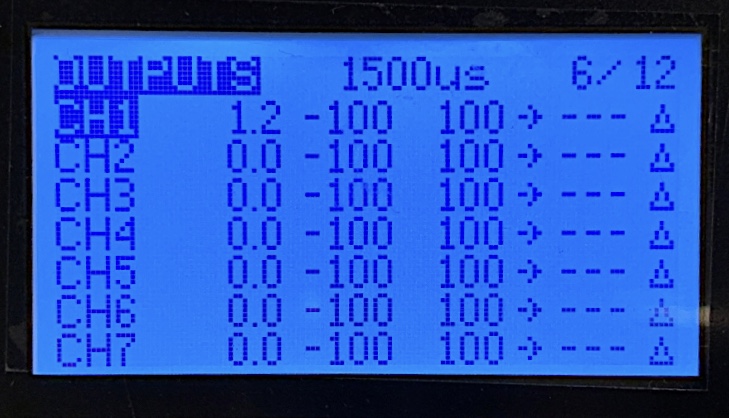
今回はSubtrimを1.2にすることで調整出来ました。
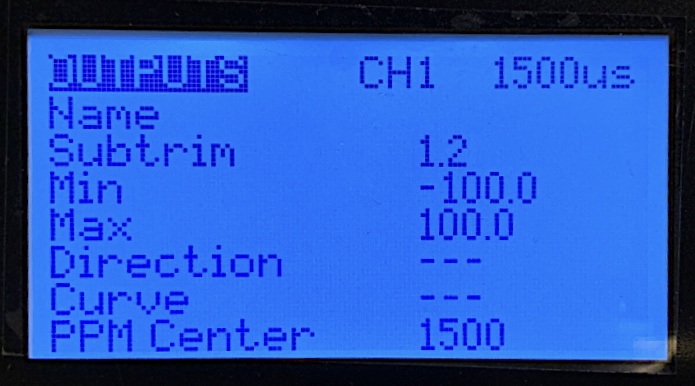
ちなみにスティックの動作が左右や上下が逆に動く場合、例えばスティックを上に上げているのにバーが左に逆方向に動く場合は、ここの設定でリバースをかけて調整する。
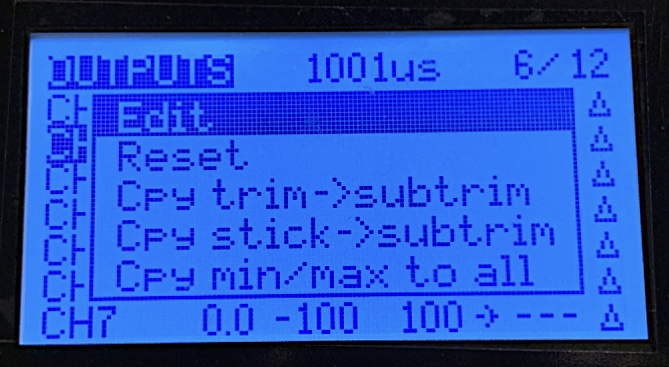
Directionの設定を「INV」にして逆転させる。
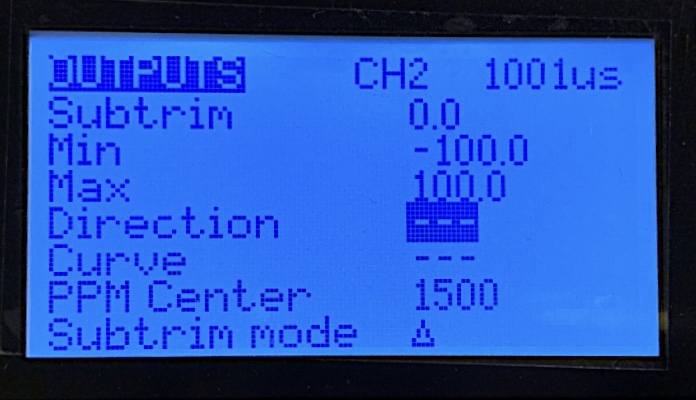
表示もCH2だけ「→」が逆向き「←」になる。これでリバース設定OK。
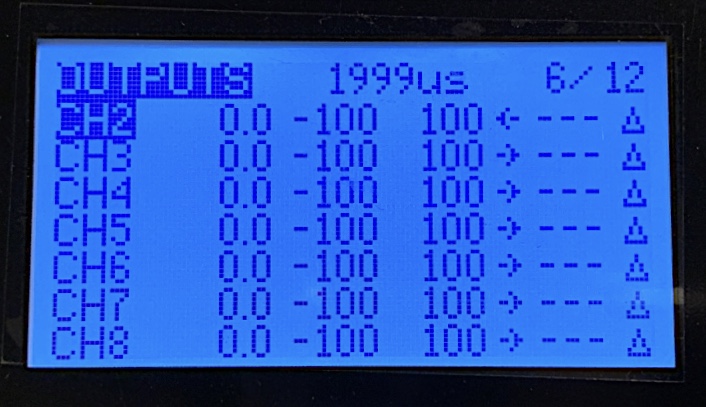
ということで、これでちゃんと微調整ができました。
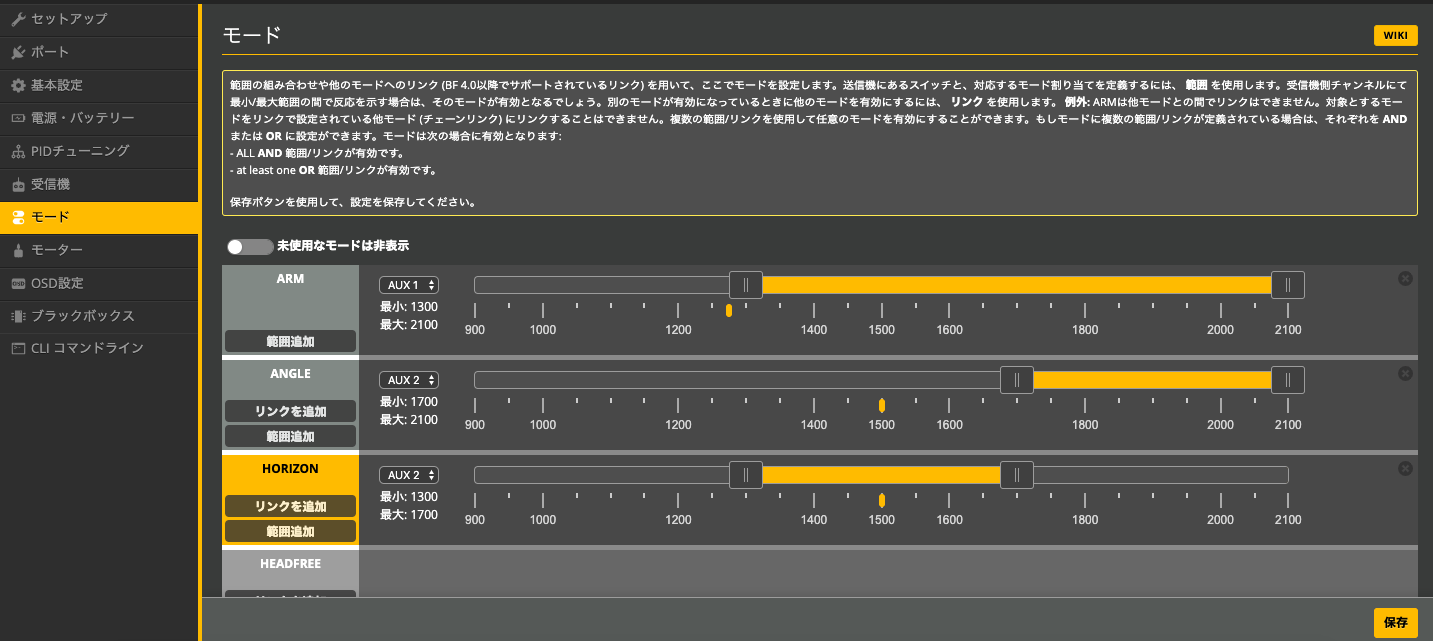
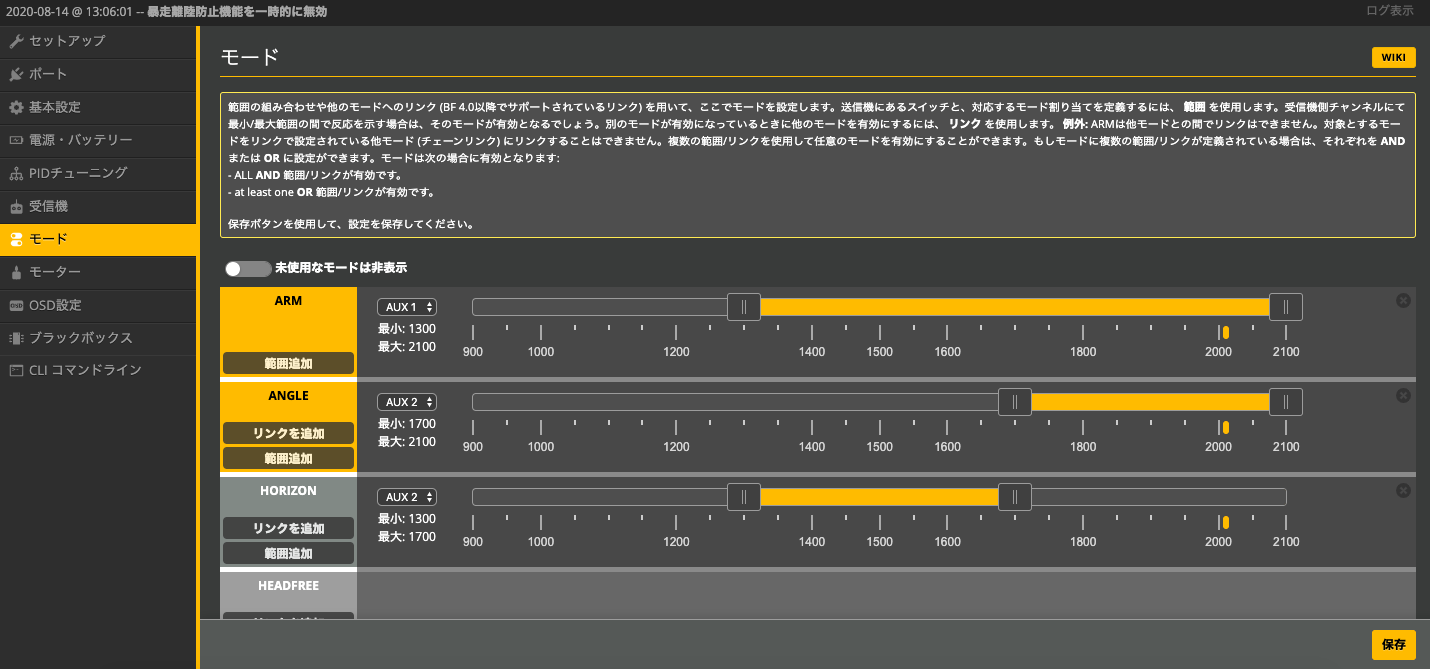
次にモードです。
「AUX1」を「SC」Switchに紐付けして「ARM」(モーターのON/OF)にしました。これはON/OFFの2Positions Switchです。
「AUX2」は「SA」Switchに紐付けして角「Mode」を選択出来るようになっています。
このSwitchは3Positions Switchなので、1つの「AUX2」に対してAngle(アングル)、Horizon(ホライゾン)、Acro(アクロ)の3つを各Positionに割り当てました。Angle(アングル)、Horizon(ホライゾン)を設定すると残りがAcro(アクロ)になります。
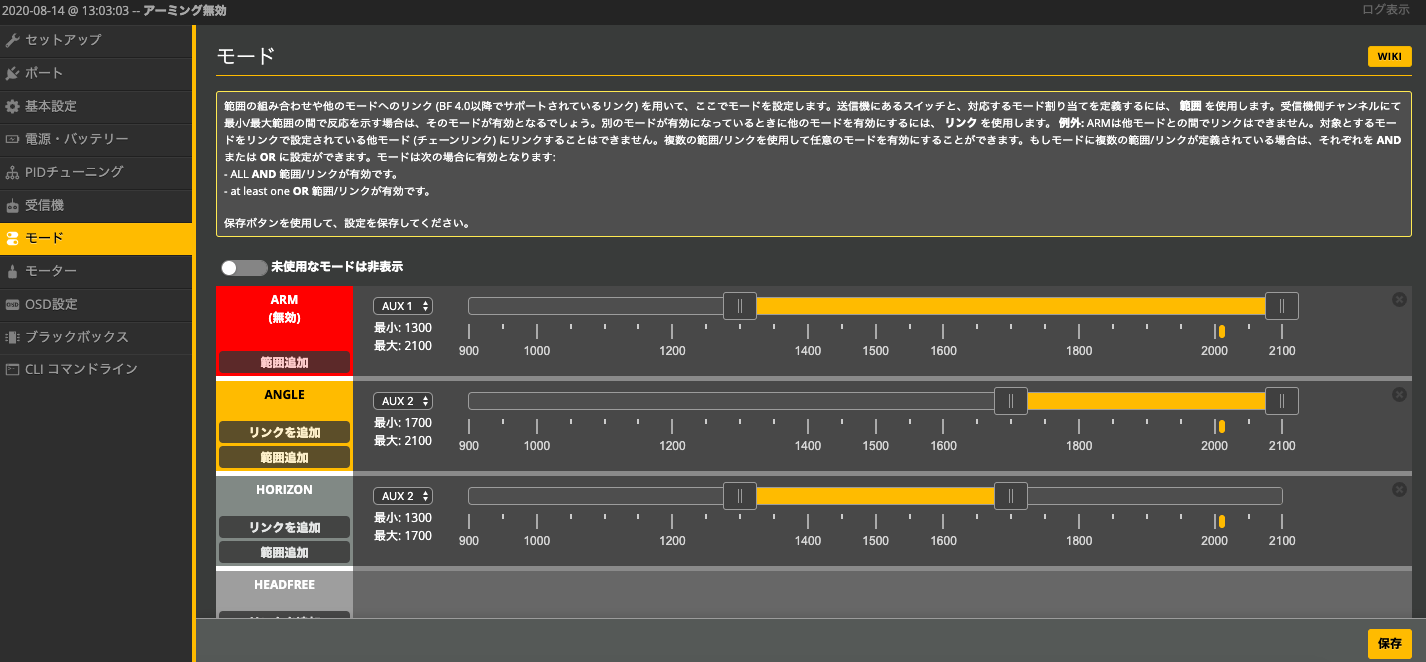
そして、ARM(モータのON/OFF)ですが、ここでプロポのSC Switchを入れてみると下のようになります。
ARMの項目が赤くなり「無効」の文字が見えます。
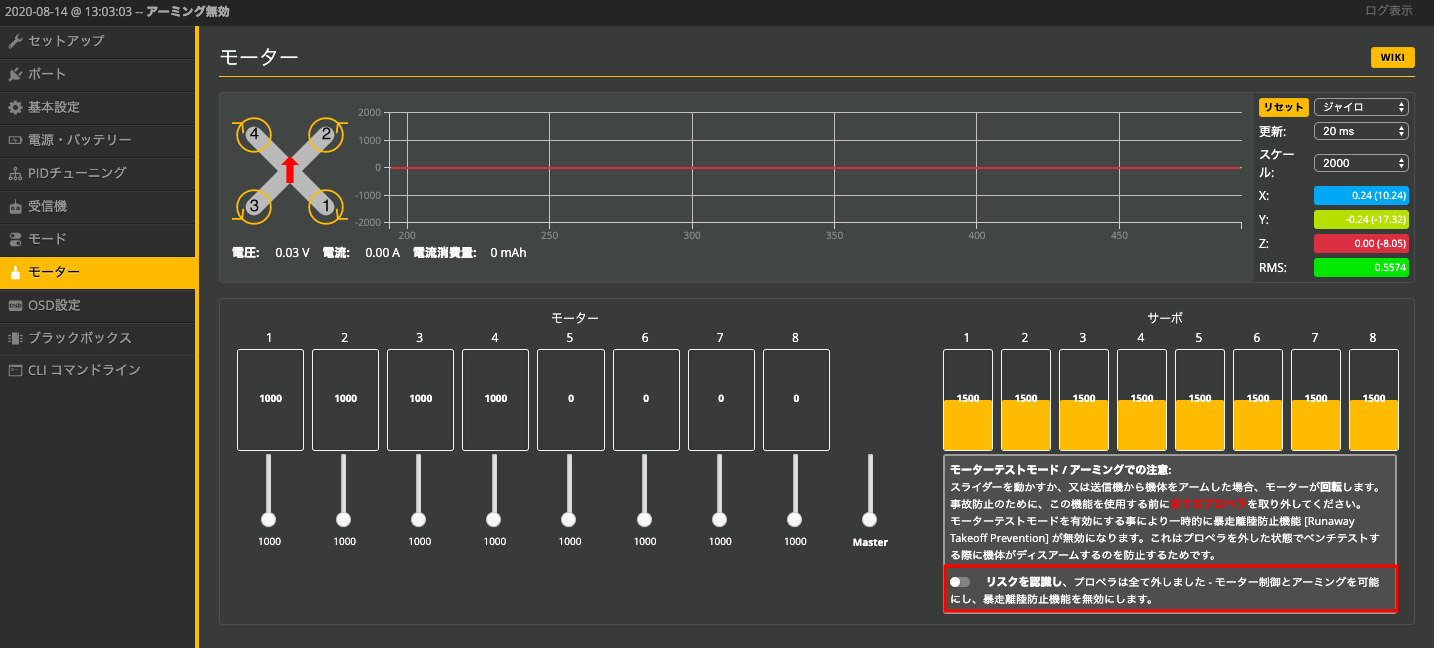
ARMの確認をする際は「モーター」の画面の右下の赤枠内のバーを「暴走離陸防止機能」を一時的に無効にする必要があります。
下画面の左上にも「アーミング無効」と表示されてます。
右下の赤枠内のバーを右にすると、画面の左上にも「暴走離陸防止機能を一時的に無効」と表示されます。
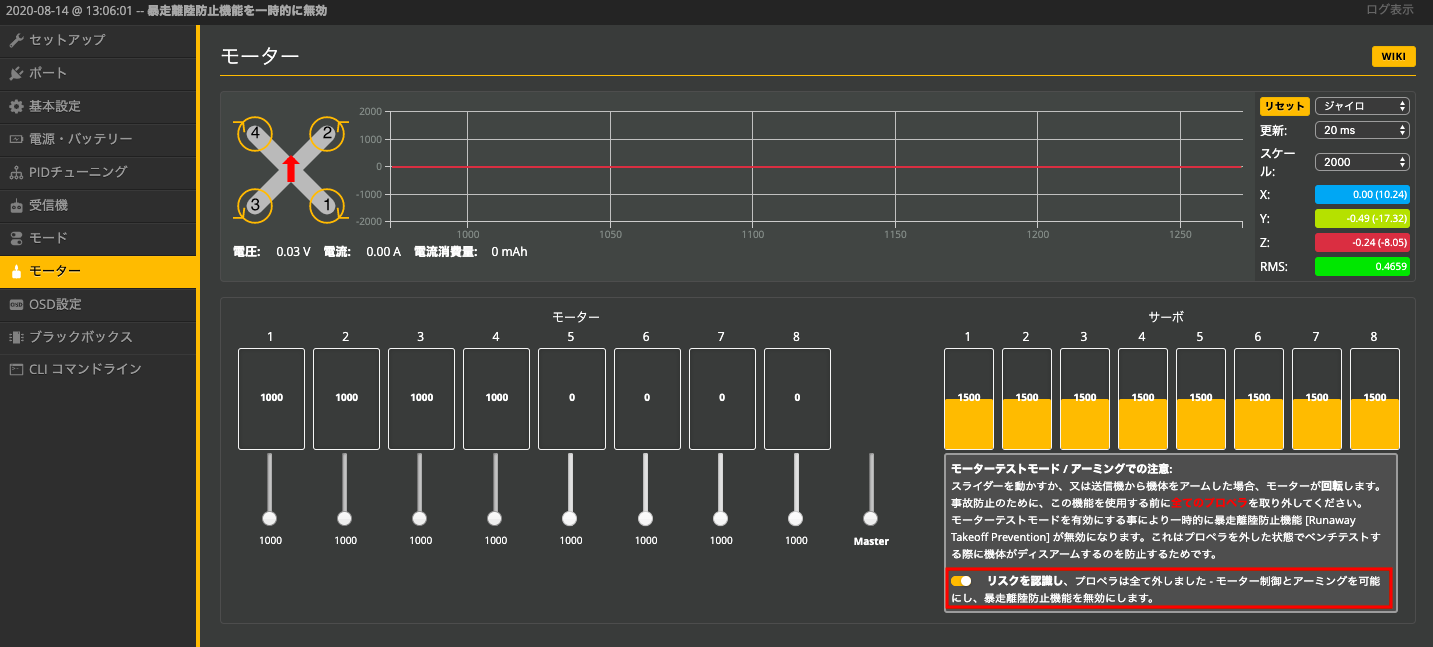
これでARM出来ます。
モードに戻ってプロポのSC SwitchをONすると、出来ました!!
ただ、これでもARMがうまくいかない場合は他の要因がありますので、セットアップ画面のERRメッセージを参考に対応します。
参考にするWebはこちらです。
ERRの名称と対応が記載されてますので、こちらを参考に原因を探ります。(下記は一覧の一部です。)
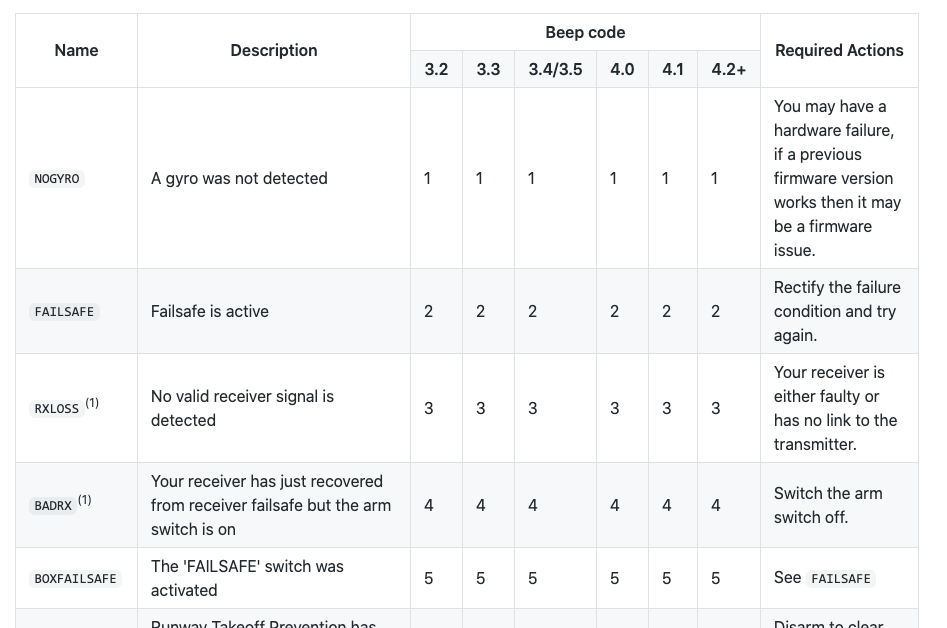
セットアップ画面の右下に「情報」という枠があるので、ここのアーム無効フラグを参考にします。

例えば、「THROTTLE」であればプロポをみるとスティックが一番下の位置になく、少し上がっていて設定値より超過した値になっている場合にでます。
アクションとしてはスティックを下に戻せばERRは消えます。
「ARM_SWITCH」は「暴走離陸防止機能を一時的に無効」にしていれば、ERRが出ないとかわかります。

あとはBATTをドローンにつなげてモーターの画面でモーターを1ずつ動作確認も出来ます。
その他の設定は特に変更していません。
ということで、これで設定は出来たと思います。
あくまでもhecatonが簡易に飛ばすための設定で備忘録的な解説です。
誤っているところがあったら申し訳ないです。あとは個々に試してみてください。
これでStep5のドローンの離陸です!!
これで遊べる!!
とゆうことでまた!!


-

-
【 Tiny Whoop】FrSky Taranis X-Lite S(White)キターーーー!!
ST-Droneをいざプロポで動かすぞ!!と楽しみにしていたのも束の間、突然Jumper T8SG V2.0 Plusが死にました・・・ まじか!!気に入ってたのに!! 電源は入るんですが、液晶が表示 ...
続きを見る
-
-
【 Tiny Whoop】Jumper JP4IN1 モジュール キターーーー!!
前回は「FrSky Taranis X-Lite S」を購入したレビューでしたが、あれだけでは動作出来ません。 今回は日本で合法的に利用するためのモジュールが届いたのでそのレビューになります!! Fr ...
続きを見る
-

-
【 Tiny Whoop】Frsky Taranis X-Lite S の 18500電池届いた!!
さあ、今回はFrsky Taranis X-LiteSの電池です。 これ本体に付属していないので別購入しなくてはなりません。 しかもサイズが18500の電池でちょっと特殊ですよね。 18650のサイズ ...
続きを見る